

Robotic device and motion control method thereof
A technology of motion control and robotics, applied in the field of control systems, can solve problems such as increasing working hours, and achieve the effect of shortening working hours and shortening work safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The implementation of the present invention will be described below with reference to specific examples, and those skilled in the art can easily understand other advantages and effects of the present invention from the content disclosed in this specification.
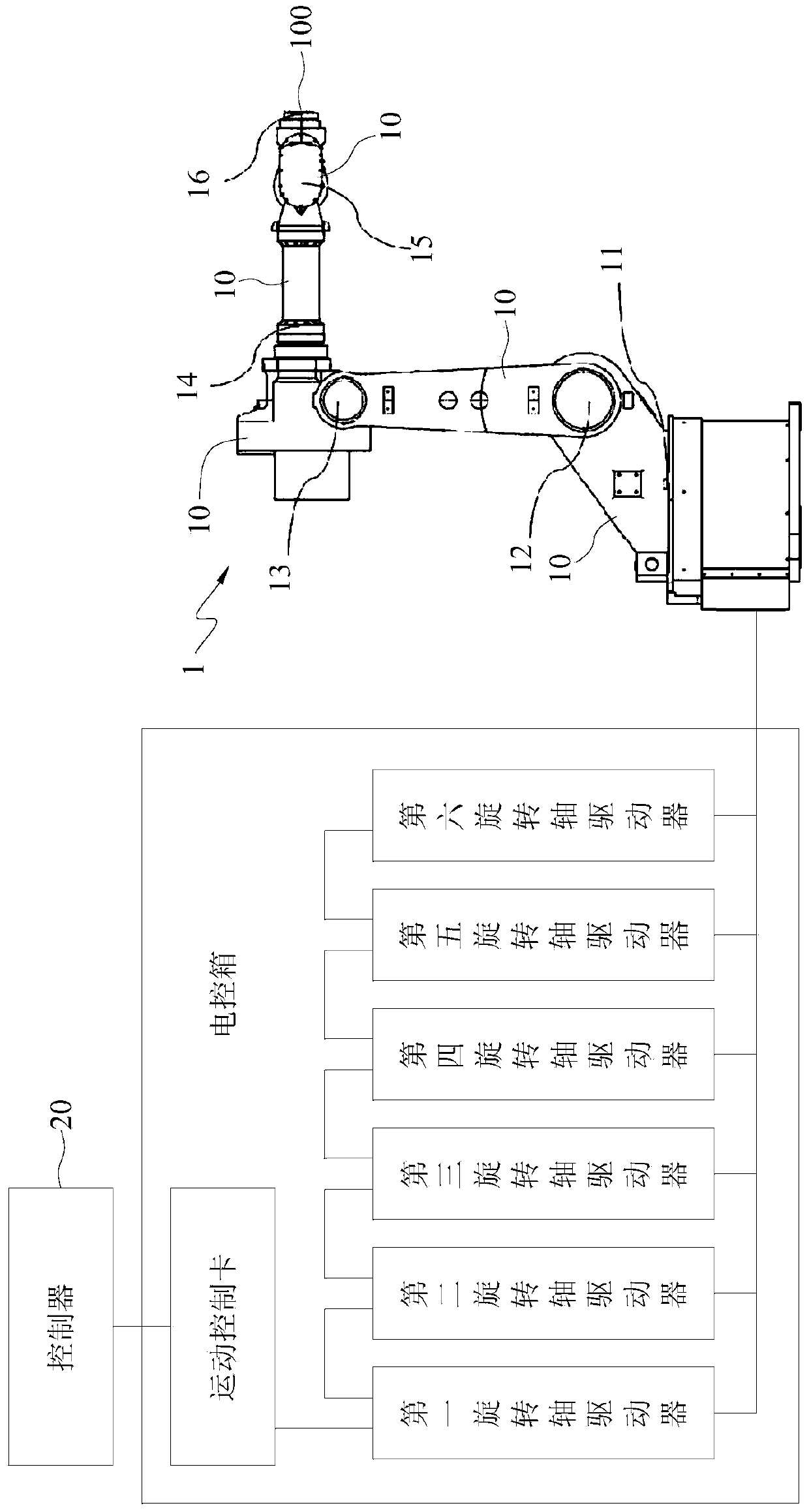
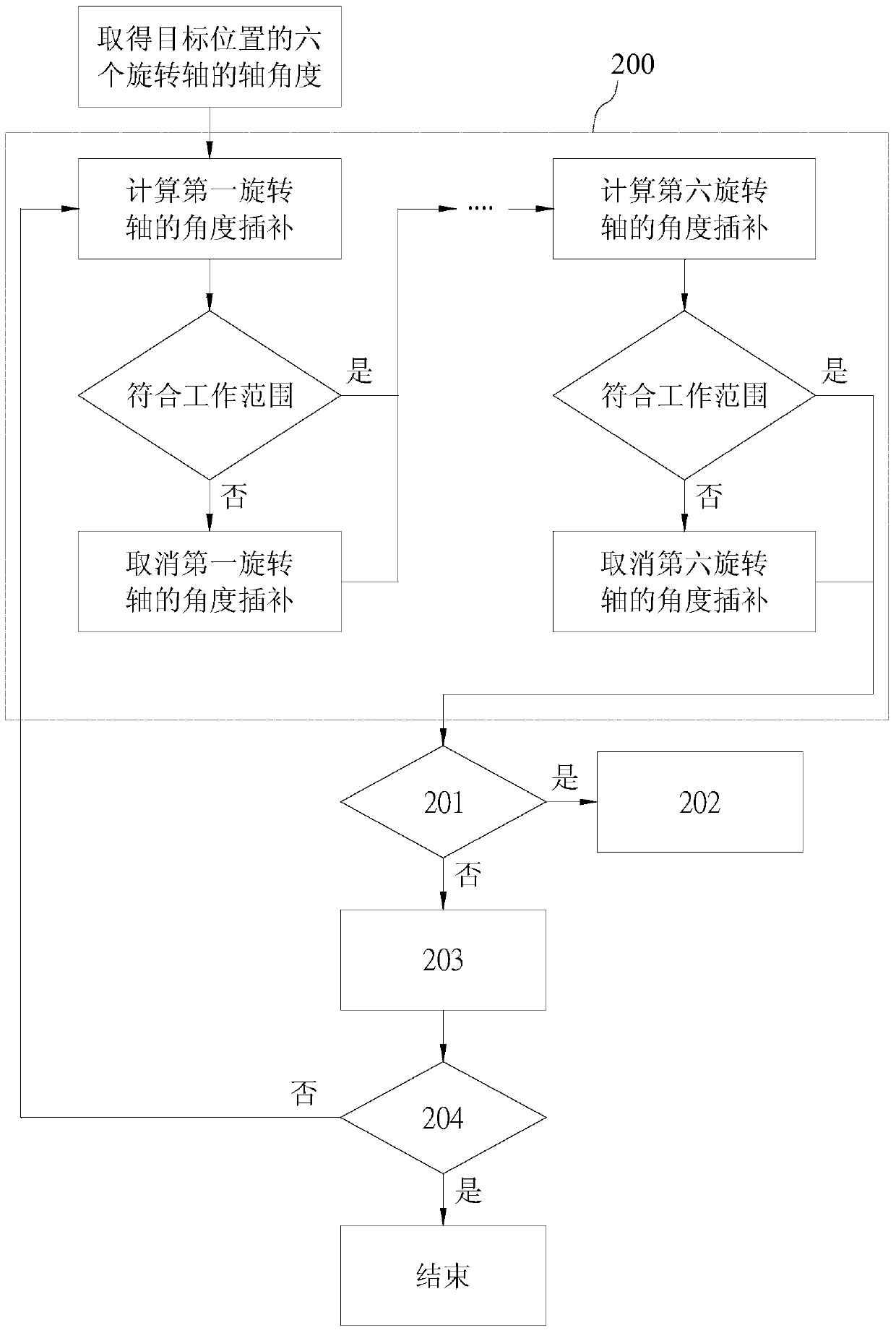
[0032] figure 2 It is a flow chart of the motion control method of the present invention. In this embodiment, the motion control method is applied as figure 1 The robot device 1 shown is the host 20 installed on the controller, so please refer to the following descriptions together figure 1 and figure 2 .
[0033] Such as figure 2 As shown, when the robot device 1 (which has a six-axis articulated robot arm 10, 100 and a host 20) performs point-to-point motion, the host 20 is used to calculate the rotation axes 11, 12, 13, 14, 15, 16 Angle, which first obtains the axis angles of the current positions of the six rotation axes 11, 12, 13, 14, 15, and 16 and the axis angles of the target positions of the six...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More