

Six-connecting-rod teaching device of six-axis robot
The technology of a six-axis robot and a teaching device is applied in the field of robots, which can solve the problems of not intuitive operation, large workload, affecting work efficiency, etc., and achieve the effect of less track adjustment work, lower enterprise costs, and accurate track data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The following are specific embodiments of the present invention and the accompanying drawings to further describe the technical solutions of the present invention, but the present invention is not limited to these embodiments.
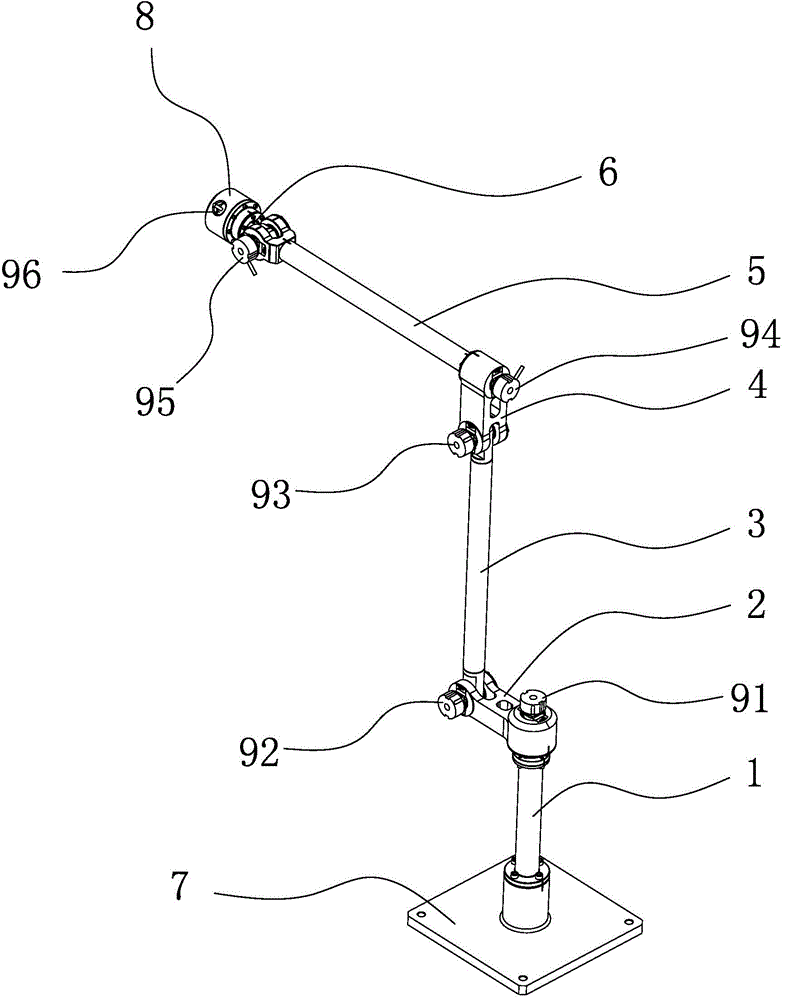
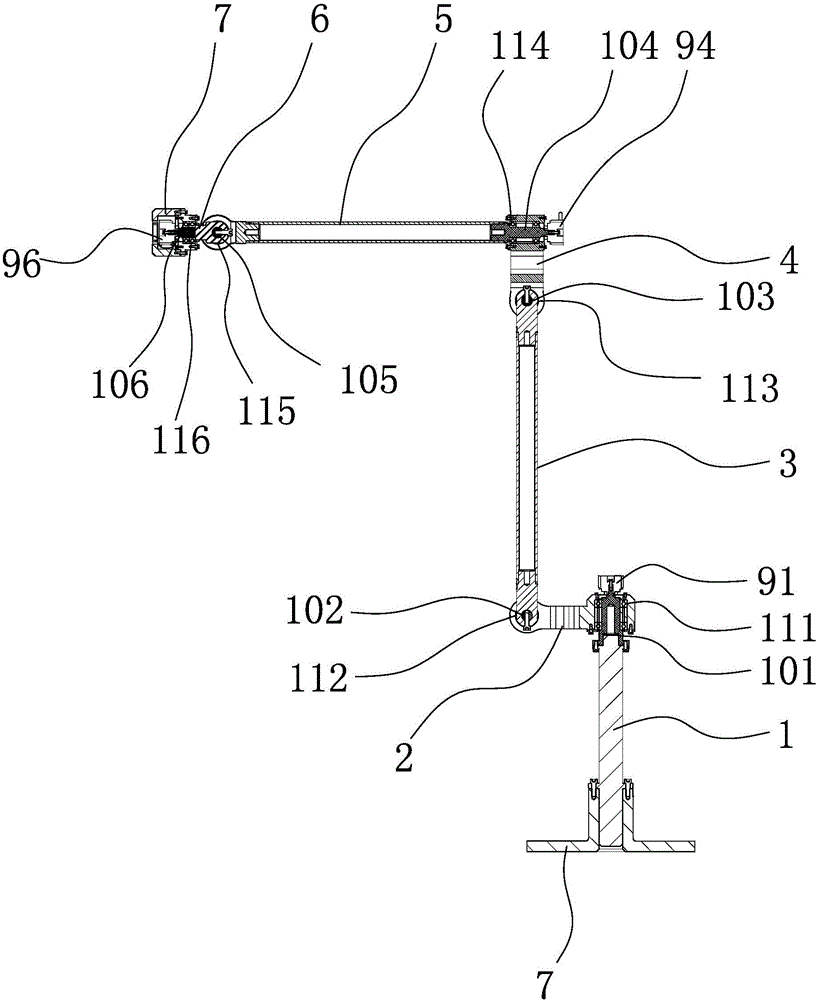
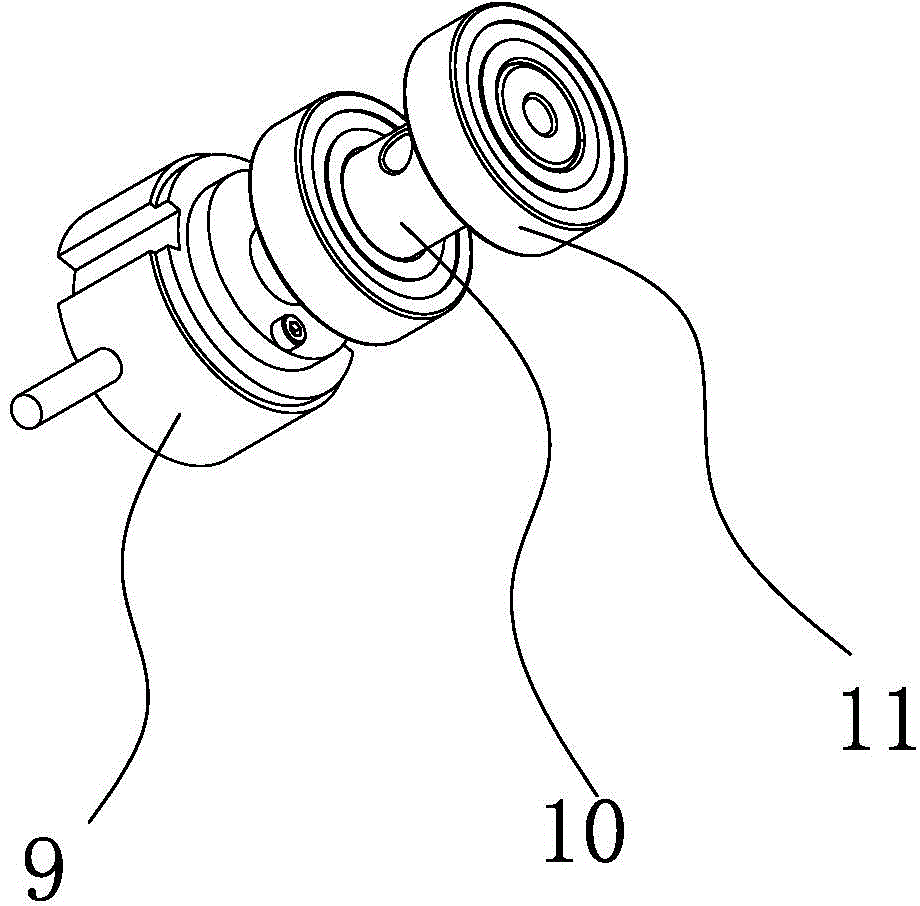
[0023] refer to figure 1 and image 3, this embodiment is a six-link teaching device for six-axis robot teaching, including link one 1, link two 2, link three 3, link four 4, link five 5, link Rod six 6, base 7, execution end 8 and six encoders 9. Connecting rod one 1 is vertically arranged, and the bottom end of connecting rod one 1 is inserted on the base 7 and fixed by bolts, connecting rod six 6, connecting rod five 5, connecting rod four 4, connecting rod three 3, connecting rod Two 2 and connecting rod one 1 are connected end-to-end through hinges in turn, the execution end 8 is coaxially connected to the front end of the connecting rod six 6, and the six encoders 9 are respectively arranged on the execution end 8 and the connecting rod ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More