

Three-dimensional laser scanning device and robot
A scanning device and three-dimensional laser technology, which are applied in the fields of robot navigation, obstacle avoidance and positioning, can solve the problem that the complex environment cannot be scanned in all directions, and achieve the effect of reasonable layout and compact overall structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further elaborated below in conjunction with the accompanying drawings.
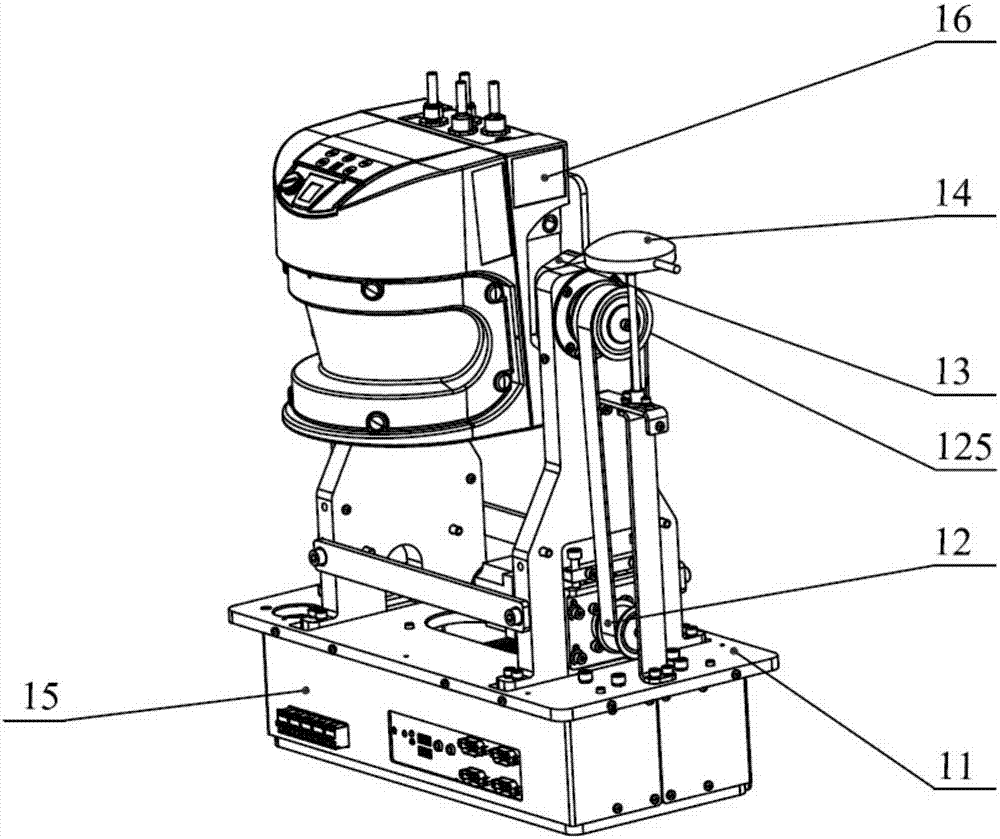
[0016] see figure 1 , an embodiment of the present invention discloses a three-dimensional laser scanning device, which includes a support assembly 11, a rotation drive assembly 12, a laser sensor rotation assembly 13, a GPS positioning assembly 14, a control box assembly 15, and a laser sensor 16. The rotation The driving assembly 12 is used to drive the laser sensor rotating assembly 13 to rotate, and the control box assembly 15 is connected to the rotating driving assembly 12 and the laser sensor 16 through cables.
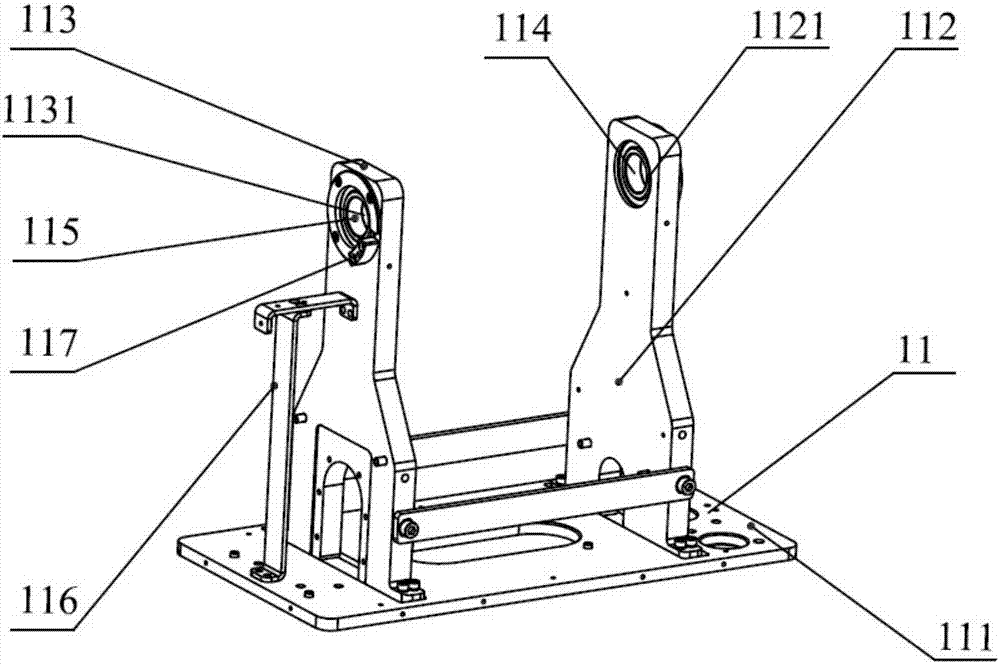
[0017] refer to figure 2 As shown, the support assembly 12 includes a bottom plate 111 , a first side vertical plate 112 , a second side vertical plate 113 , a first rotary bearing 114 , a second rotary bearing 115 and a GPS component bracket 116 . Wherein, the first side vertical plate 112 and the second side vertical plate 113 are symmetrically in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More