

Automatic obstacle avoidance method of unmanned aerial vehicle (UAV)
An automatic obstacle avoidance and unmanned aerial vehicle technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of reducing battery usage time, increasing usage costs, and increasing overall energy consumption, achieving cost savings, The effect of accurate obstacle avoidance and safe flight process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
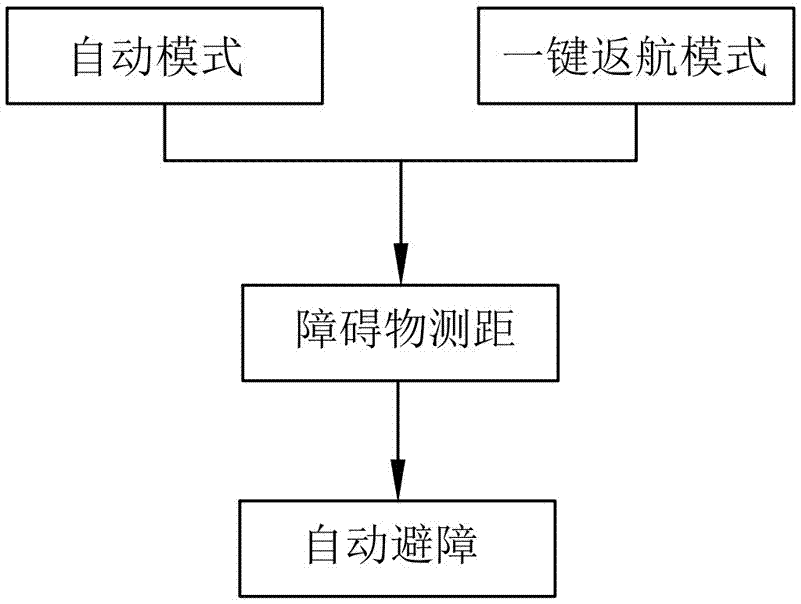
[0050] like figure 1 As shown, a UAV automatic obstacle avoidance method, the UAV includes a UAV body and an infrared sensor, the front side and the left and right sides of the UAV body are equipped with infrared sensors, and the UAV body is equipped with an infrared sensor. The drone is provided with an automatic mode, a one-key return mode, a manual mode and a motion mode, and the automatic obstacle avoidance of the drone is carried out in the automatic mode or the one-key return mode, and the obstacle avoidance method of the drone includes the following steps:
[0051] S1: Turn on the automatic mode of the drone or the one-key return mode;
[0052] S2: The infrared sensor detects the distance between the UAV and surrounding obstacles;
[0053] S3: UAV automatically avoids obstacles.
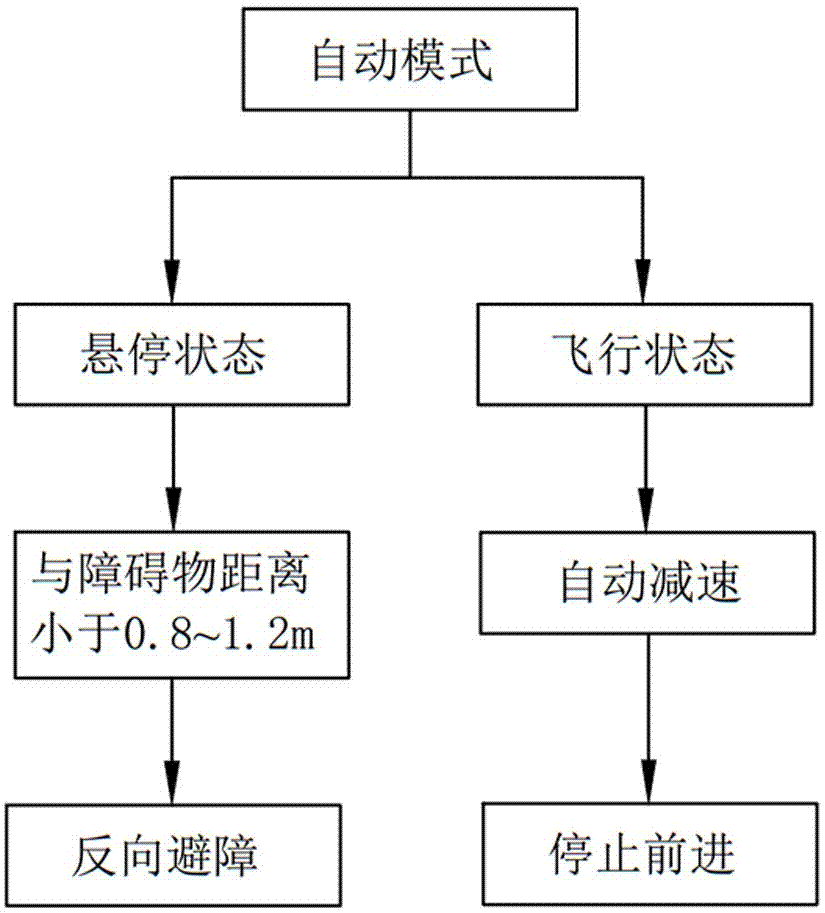
[0054] Further, such as figure 2 As shown, in the step S1, the automatic mode includes the hovering state of the automatic mode, and when the drone is in the hovering state of the automati...
Embodiment 2
[0062] The difference between this embodiment and Embodiment 1 is that when the drone is in the hovering state of the automatic mode, in the step S2, the infrared sensors on the front side and the left and right sides of the drone detect obstacles When the object distance is less than 0.8m, the UAV flies in the opposite direction and automatically avoids obstacles.
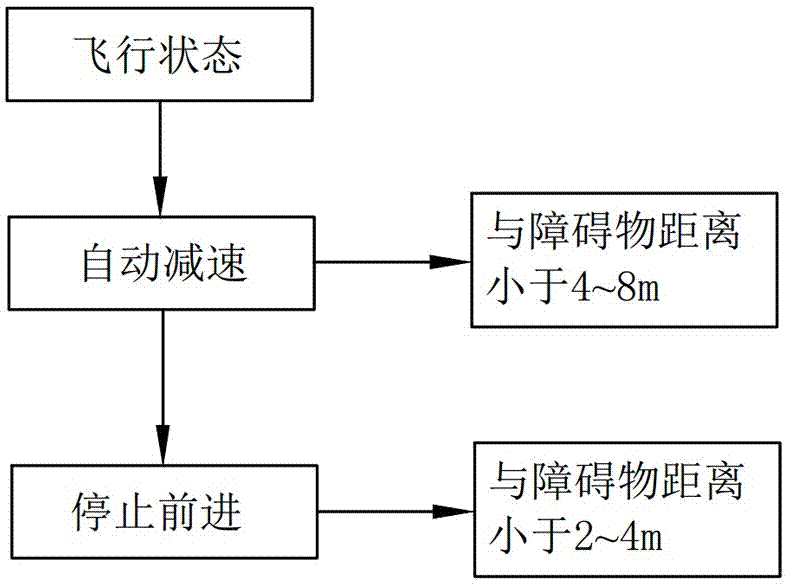
[0063] The automatic deceleration step of the UAV is that when the infrared sensors on the front side and / or left and right sides of the UAV detect that the obstacle distance is less than 8m, the UAV automatically decelerates.
[0064] Further, such as image 3 As shown, the step of stopping the unmanned aerial vehicle is that when the infrared sensors on the front side and / or left and right sides of the unmanned aerial vehicle detect that the distance from the obstacle is less than 4m, the unmanned aerial vehicle stops advancing.
[0065] Further, the automatic ascending step of the UAV is that when the infrared...
Embodiment 3
[0067]The difference between this embodiment and Embodiment 1 is that the automatic ascending step of the UAV is that when the infrared sensor on the front side of the UAV detects that the distance between the obstacle and the obstacle is less than 7m, the UAV first automatically ascends. When the infrared detector in front continues to monitor until there is no obstacle in front, stop ascending and continue to fly forward. When encountering an obstacle again, the same infrared sensor on the front detects that the distance between the obstacle and the obstacle is less than 7m. The aircraft starts to rise automatically again. At this time, when the infrared detector in front continues to monitor that there is no obstacle in front, it stops rising, continues to fly to the home position, and finally reaches above the home point, and then descends vertically to the home point.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More