

Dual-target positioning method for simulated medical instrument and virtual simulation medical teaching system
A positioning method and technology of medical equipment, applied in the field of medical teaching and training system, can solve the problem of not being able to adjust the activity area at will
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
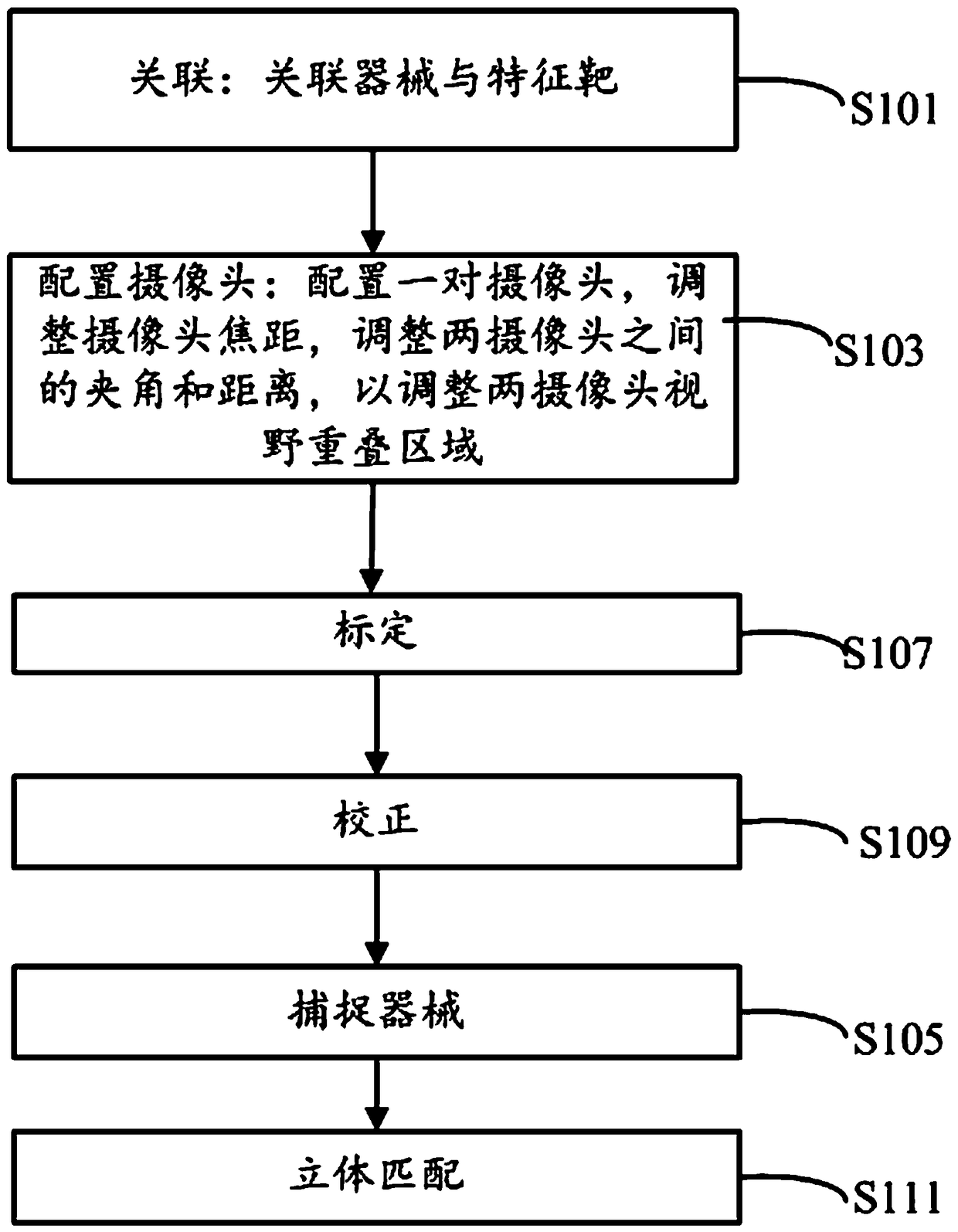
[0083] Such as figure 1 As shown, the dual-target positioning method of a simulated medical device according to an embodiment of the present invention is characterized in that it includes the following steps:
[0084] Step S101, associating: associating the instrument with the characteristic target.
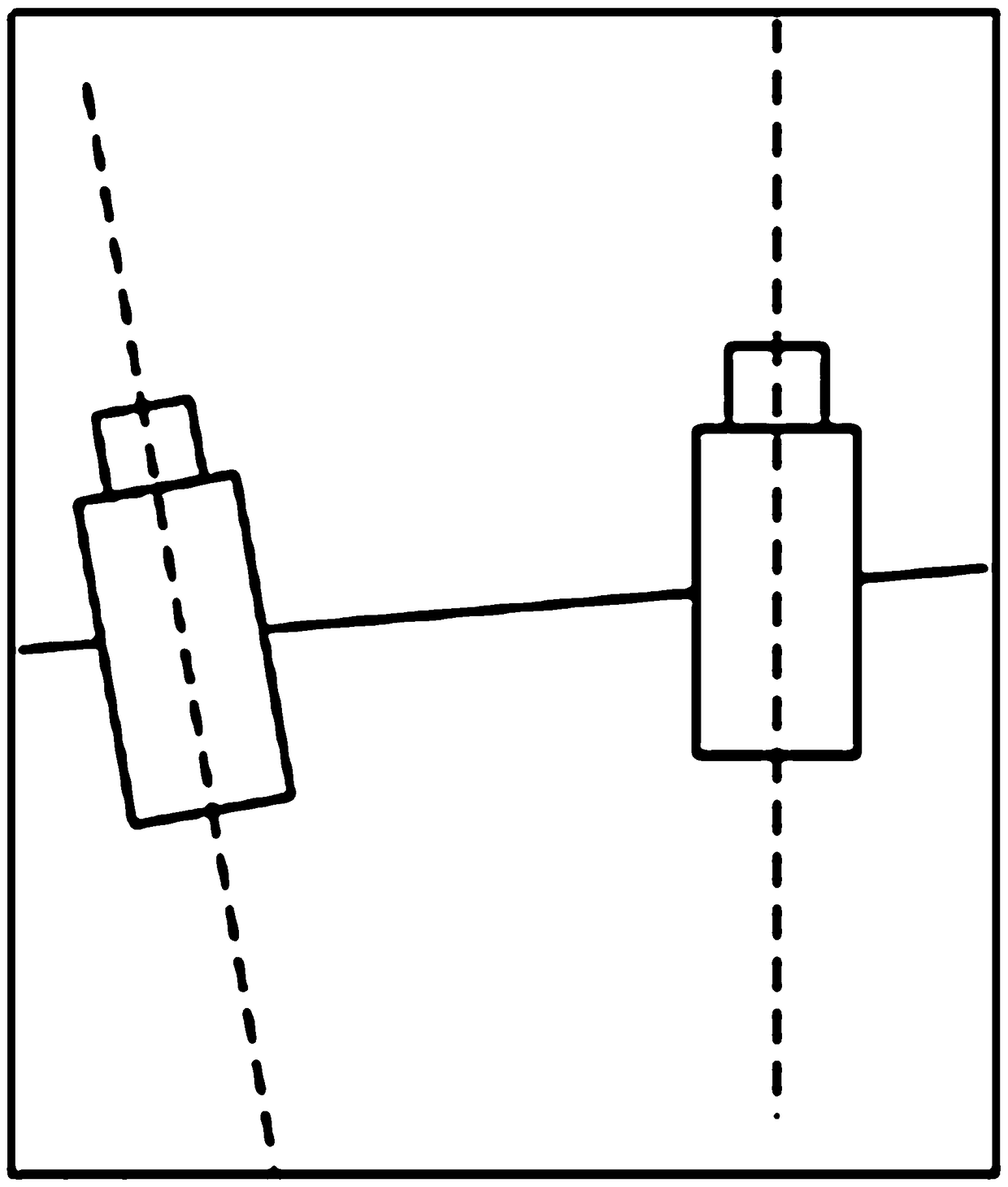
[0085] Step S103, configuring the cameras: configuring a pair of cameras, adjusting the focal length of the cameras, adjusting the angle and distance between the two cameras, so as to adjust the overlap area of the two cameras.
[0086] Step S105, capturing the instrument: capture the characteristic target by taking a snapshot to capture the instrument.
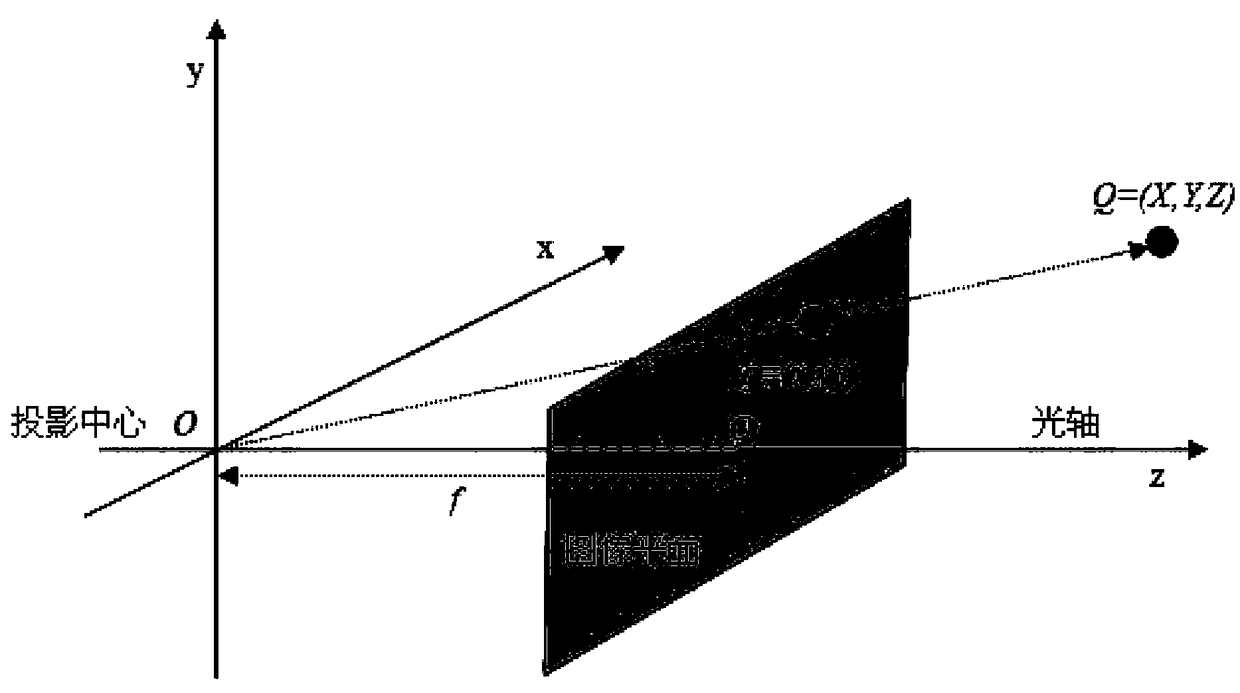
[0087] Step S107, calibration: the camera acquires the image of the calibration reference object, measures the position of each feature point on the calibration reference object relative to the world coordinate system, selects the world coordinate system as the object coordinate system of the calibration reference object, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More