

Global Finite Time Neural Network Control Method for Nonlinear Strict Feedback Systems
A neural network control and feedback system technology, applied in the field of nonlinear strict feedback system global finite time neural network control, can solve the problem of whether the neural network approximation is always effective or not
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
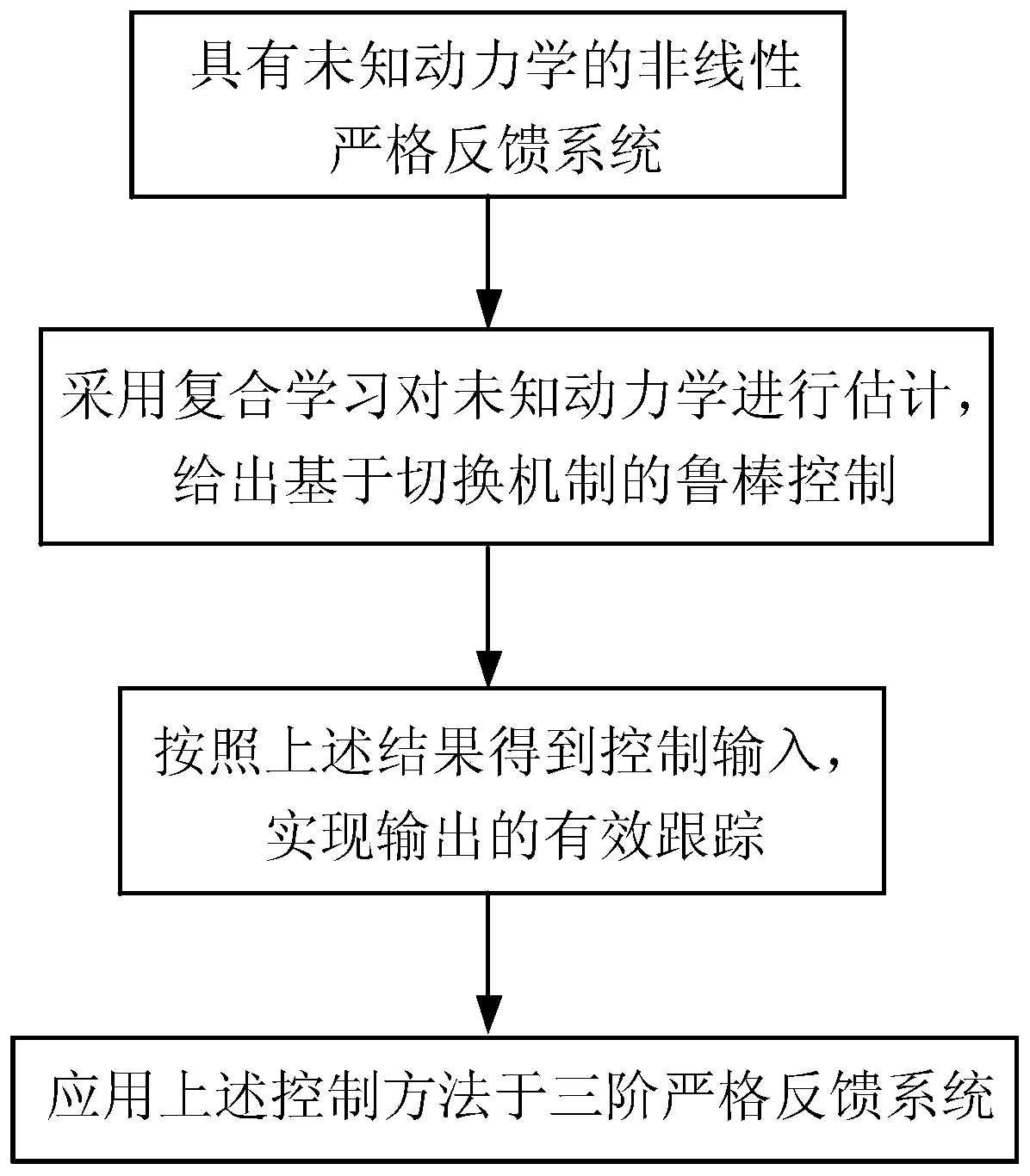
[0149] Reference figure 1 , The global finite-time neural network control method of the nonlinear strict feedback system of the present invention is applied to the third-order strict feedback dynamics model, which is realized through the following steps:
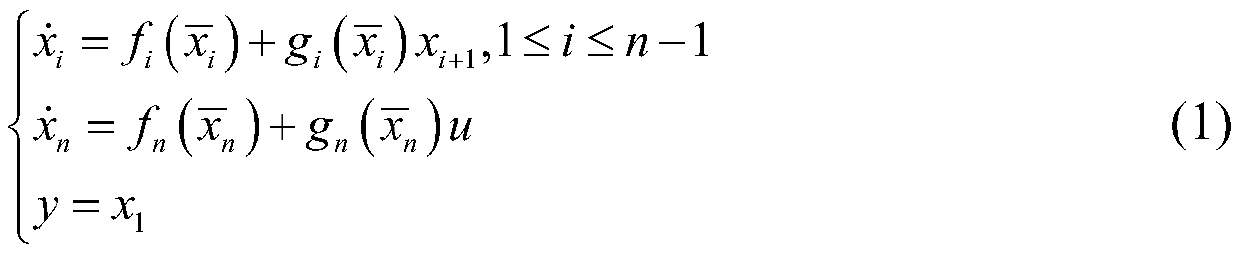
[0150] (a) Establish the following third-order nonlinear strict feedback system dynamics model:
[0151]
[0152] Among them, the system state vector x(t)=[x 1 ,x 2 ,x 3 ] T , The system control input is u, the system output is y=x 1 , Represents an unknown nonlinear function, satisfying Represents the known item, satisfies
[0153] (b) The design switching function is:
[0154]
[0155] among them,
[0156]
[0157] Where λ i2 > λ i1 > 0, i = 1, 2, 3 means that the neural network effectively approximates the unknown nonlinear function The boundary of the tight subset of, b=2 and τ k = 1.
[0158] (c) Define the output tracking error as:
[0159] e 1 = X 1 -y r (4)
[0160] Where y r For output reference instructions.
[0161] Des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More