

Planet detection autonomous obstacle avoidance mobile robot
A technology for mobile robots and planets, applied in the field of planetary detection, can solve the problems of dim surface light, large temperature difference, and high temperature, and achieve the effects of reducing the number of drives, improving stability, and simplifying the transmission structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
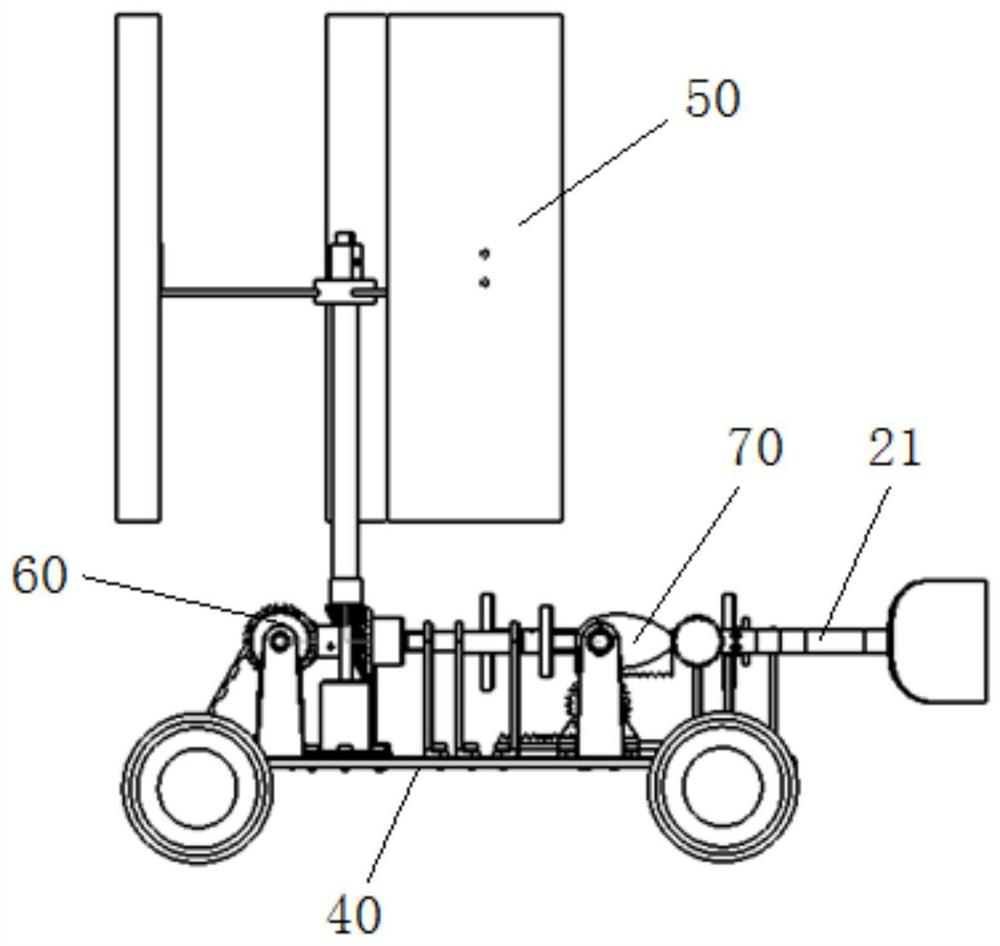
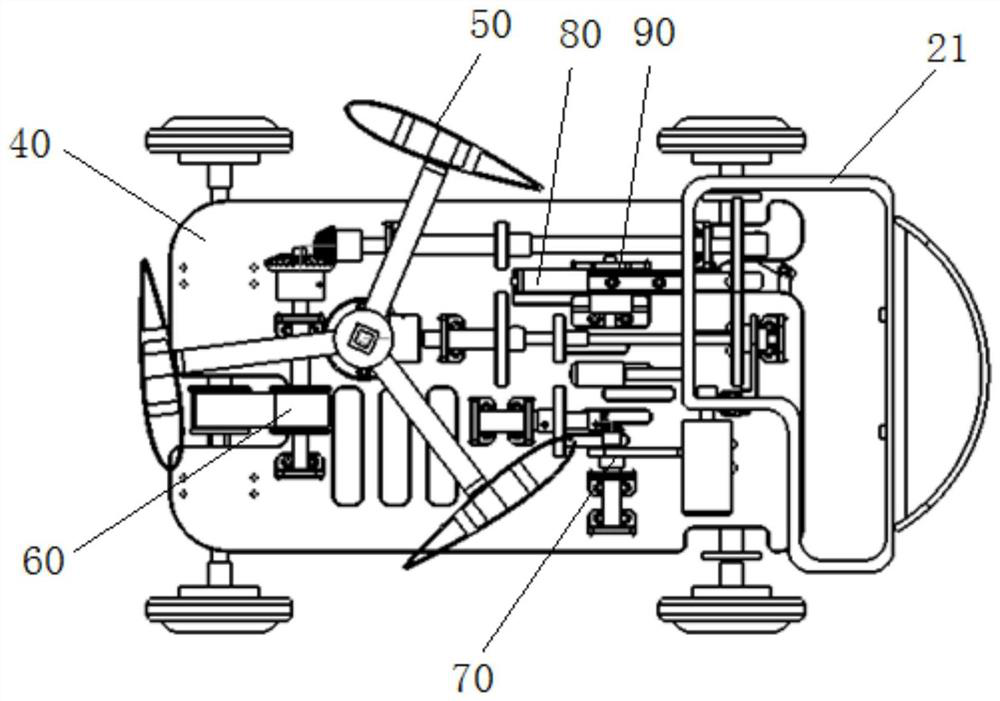
[0029] Such as Figure 1-2 As shown, a planet detection autonomous obstacle avoidance mobile robot provided by the present invention includes a chassis 40 and a vertical axis wind generator 50 arranged on the chassis 40, a drive forward system 60, a path reset system 70, and an obstacle avoidance and retreat system 80 , the obstacle avoidance turning system 90 and the coupling trigger 21, wherein the drive forward system 60, the path reset system 70, the obstacle avoidance retreat system 80 and the obstacle avoidance turning system 90 are coupled together through the coupling trigger 21, and the coupling trigger 21 and the chassis 40 can move relative to each other, the driving forward system 60 is connected with the vertical axis wind generator 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More