

Unmanned aerial vehicle self-active platform take-off and landing auxiliary device
An auxiliary device and unmanned aerial vehicle technology, which is applied to ground devices, landing gear, aircraft parts, etc., can solve the problems of poor battery life and inability to provide global information on the water surface for a long time, and achieve the effect of good stability and accurate control methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
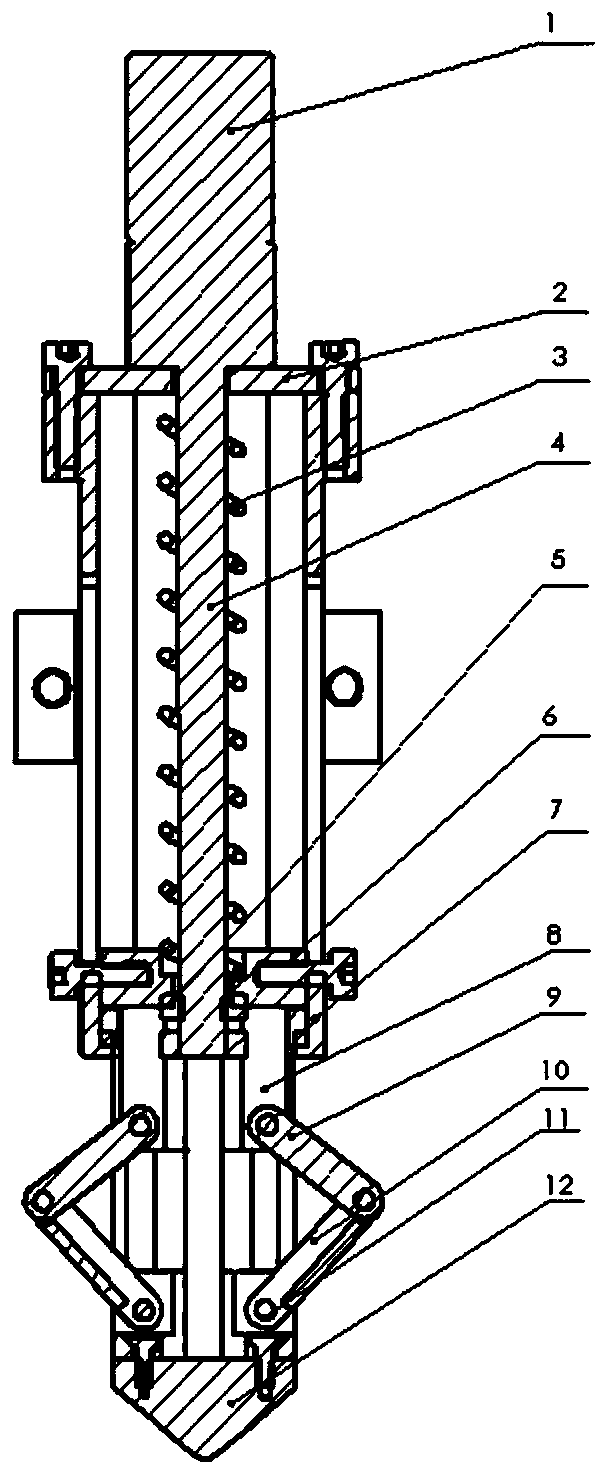
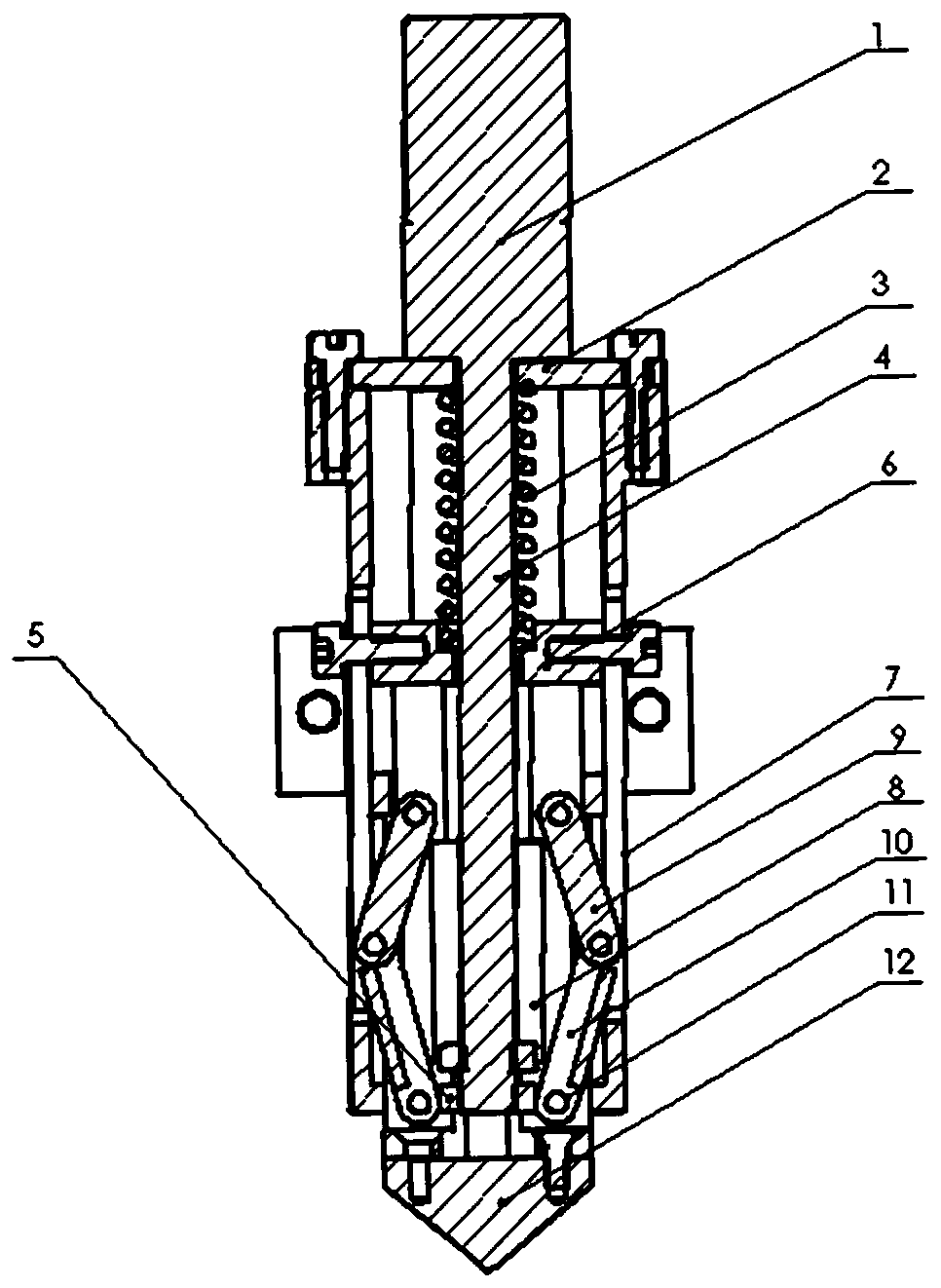
[0036] Such as figure 1 , figure 2 As shown, this embodiment provides an auxiliary device for unmanned aerial vehicle self-active platform take-off and landing, including: DC geared motor 1, compression spring 3, DC geared motor screw 4, motor slider 5, rectangular slider 6, rectangular sleeve 7. Front fork 8, connecting rod 9, stop arm 10 and torsion spring 11;
[0037] In this embodiment, the top of the rectangular sleeve 7 is provided with a rectangular sleeve top cover 2, and the bottom is provided with a harpoon structure protruding hole, and the DC geared motor 1 is fixedly installed on the rectangular sleeve top cover 2. The compression spring 3, the rectangular slider 6 and the harpoon structure are sequentially placed in the rectangular sleeve 7 from top to bottom, and the rectangular sleeve 7 is provided with a through hole, so that one end of the DC geared motor screw 4 is arranged in the rectangular sleeve, The DC geared motor screw 4 is connected to the harpoon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More