

A two-person remote operation training method based on virtual fixture
A technology of virtual fixtures and training methods, which is applied in the direction of manufacturing tools, program control manipulators, manipulators, etc., and can solve the problems of poor guidance of coaches, inability to quickly train newbies, poor coaching effects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0051] A two-person remote operation training method based on a virtual fixture, comprising the following steps:
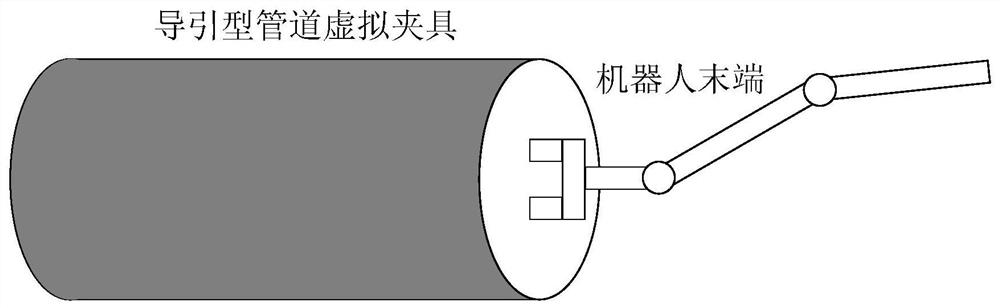
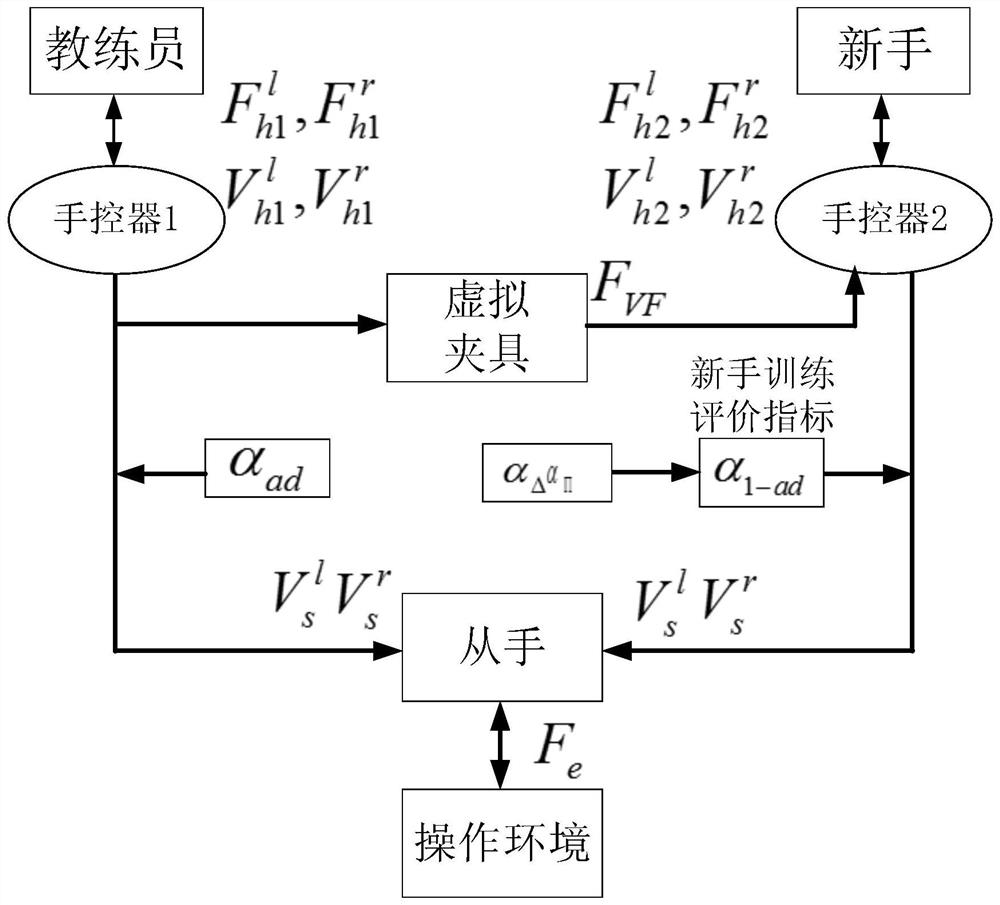
[0052] 1) At the master end of the operation, the trainer and the novice respectively control a dual-arm robot through the hand controller, and the slave end is a dual-arm robot. During the operation training task, a two-person dynamic model of the trainer and the novice is established:
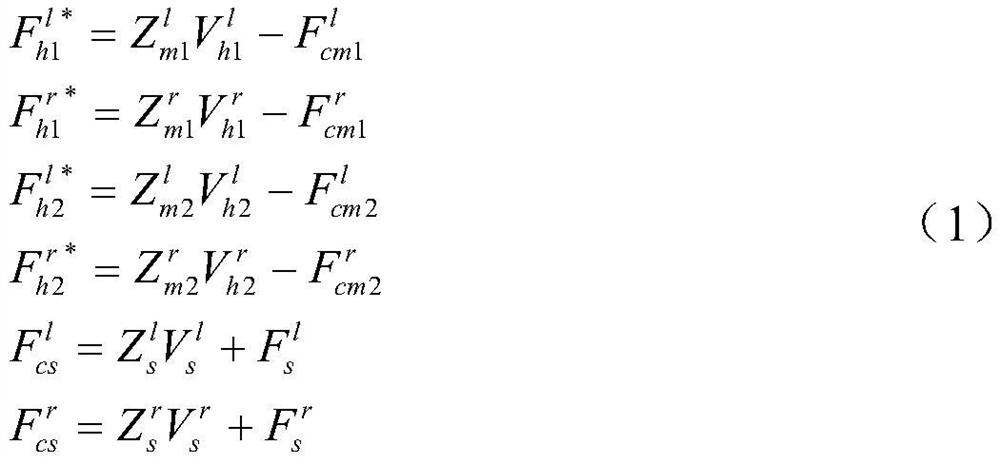
[0053]
[0054] in, and i=1, 2 respectively represent the force applied by the operator (coach and novice) to the (left / right) hand controller; and i=1, 2 represent the control power of the operator's left and right hands (trainer and novice) respectively; and i=1, 2 respectively represent the mass model impedance of the driving force of the left and right hands of the operator (trainer and novice), and s is the Laplacian operator; and i=1, 2 repre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More