

Roadside end pedestrian trajectory prediction algorithm based on adversarial generative network
A trajectory prediction, pedestrian technology, applied in biological neural network model, prediction, calculation and other directions, can solve the problem of complex and diverse pedestrians
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
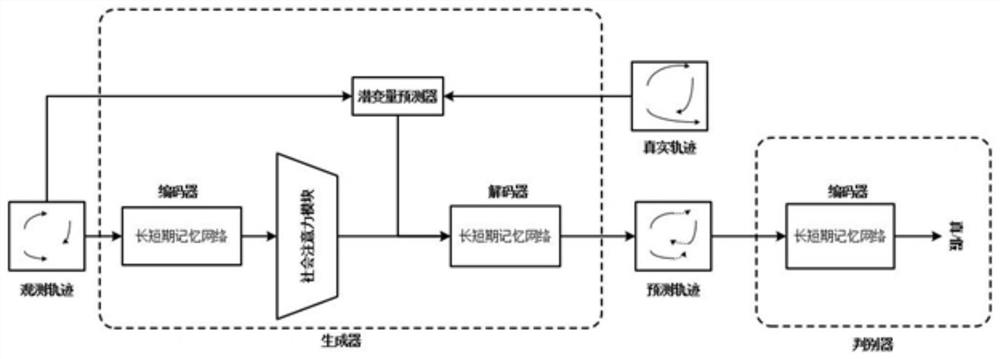
[0068] like Figure 1-Figure 4 A roadside pedestrian trajectory prediction algorithm based on an adversarial generative network is shown, including the following steps:
[0069] S10: use the encoder to encode the input track;
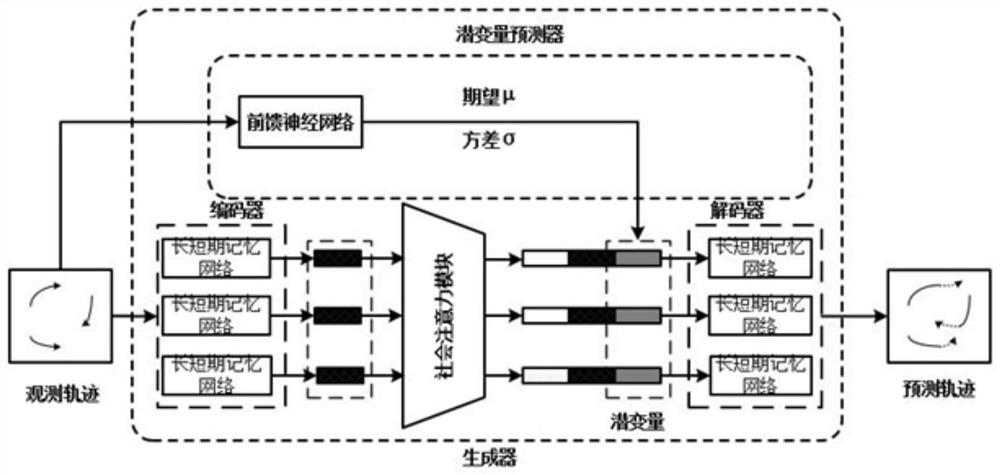
[0070] S20: Calculate pedestrian social attention by using pedestrian head orientation;
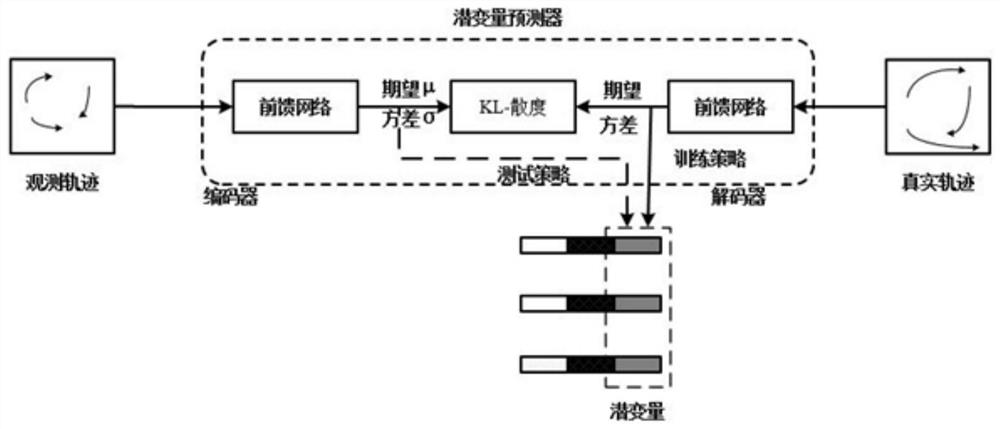
[0071] S30: Applying a latent variable predictor to generate a predictable latent variable distribution;
[0072] S40: Generate a predicted future trajectory of pedestrians;
[0073] S50: Use the discriminator to optimize the pedestrian trajectory generated by the generator;
[0074] The step 1 specifically includes the following steps:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More