

Intersection motion planning method and device of automatic driving equipment, and electronic equipment
An automatic driving and motion planning technology, applied in the field of computer-readable storage medium and intersection motion planning of automatic driving equipment, can solve the problems of slow learning process, difficult model convergence, waste of computing resources of automatic driving equipment, etc. The effect of saving computing resource consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
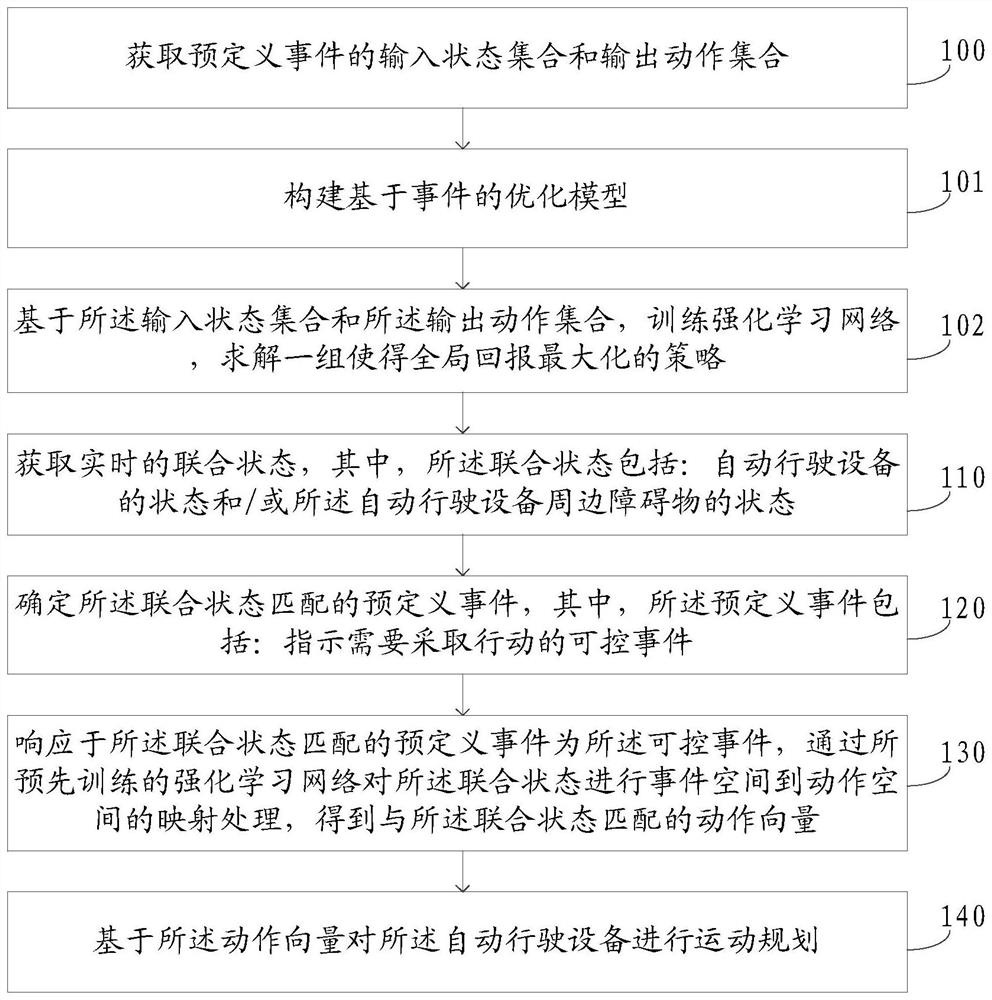
[0029] In the motion planning task, it is necessary to consider the motion state information of the automatic driving equipment and surrounding obstacles such as position, speed, and steering. Directly using the state vector to describe the motion state of the automatic driving device has a large dimension, and as the scene becomes more complex, it will face the curse of dimensionality when searching the solution space. The intersection motion planning disclosed in the embodiment of the present application aims to improve the existing reinforcement learning-based motion planning scheme, and integrate the event-driven optimization method into the decision-making problem of the intersection scene. Use the problem structure to do state aggregation to alleviate the dimensionality disaster of the search space and reduce the influence of unnecessary dimensional information on the learning results, thereby improving the accuracy of path planning.
[0030] Based on the ideas above, in...
Embodiment 2
[0092] An intersection motion planning device for automatic driving equipment disclosed in the embodiment of the present application, such as Figure 4 As shown, the device includes:
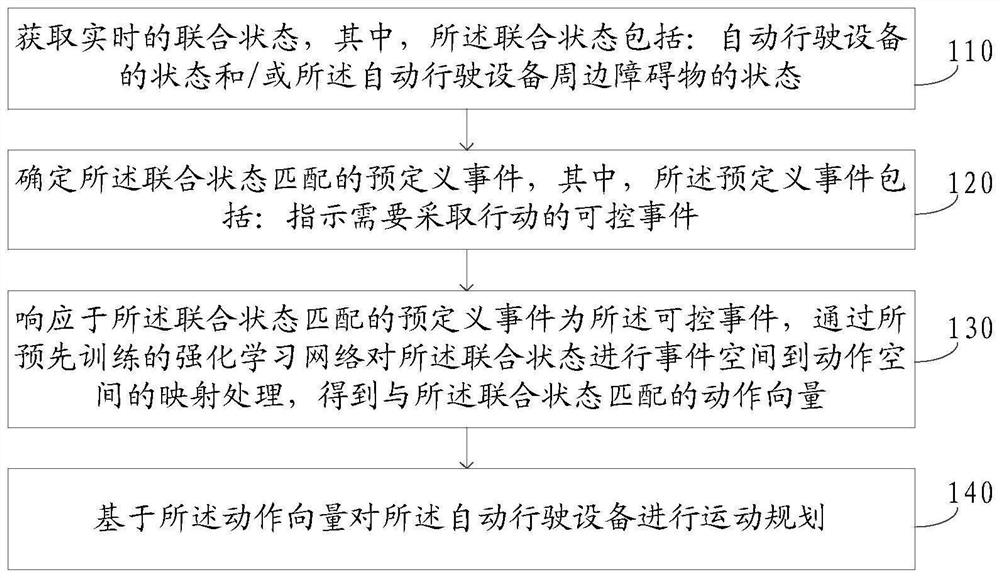
[0093] A real-time joint state acquisition unit 410, configured to acquire a real-time joint state, wherein the joint state data includes: state data of the automatic driving device and state data of obstacles around the automatic driving device;
[0094] An event determining unit 420, configured to determine a predefined event matching the joint state, wherein the predefined event includes: a controllable event indicating that an action needs to be taken;
[0095] The controllable event decision unit 430 is configured to respond to the predefined event matched by the joint state as the controllable event, and perform a mapping process on the joint state from event space to action space through the pre-trained reinforcement learning network, obtaining an action vector matching the joint state; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More