

A seawater automatic sampling drone and its working method
An automatic sampling and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of insufficiency of sampling personnel, increase sampling cost, time-consuming and other problems, and achieve the effect of ensuring the accuracy of analysis, saving manpower and improving sampling efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
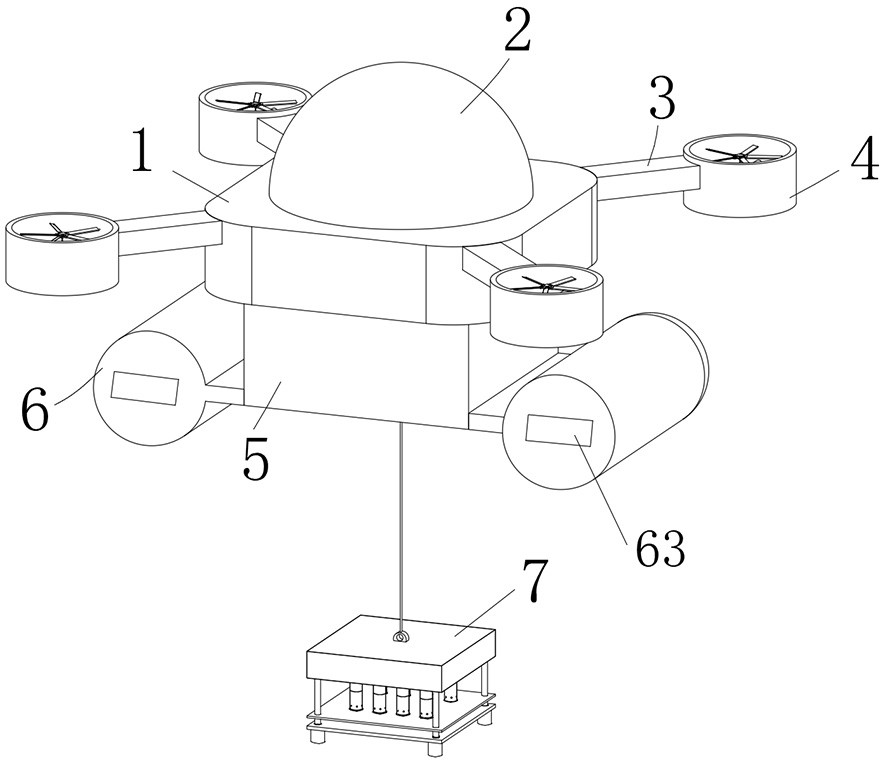
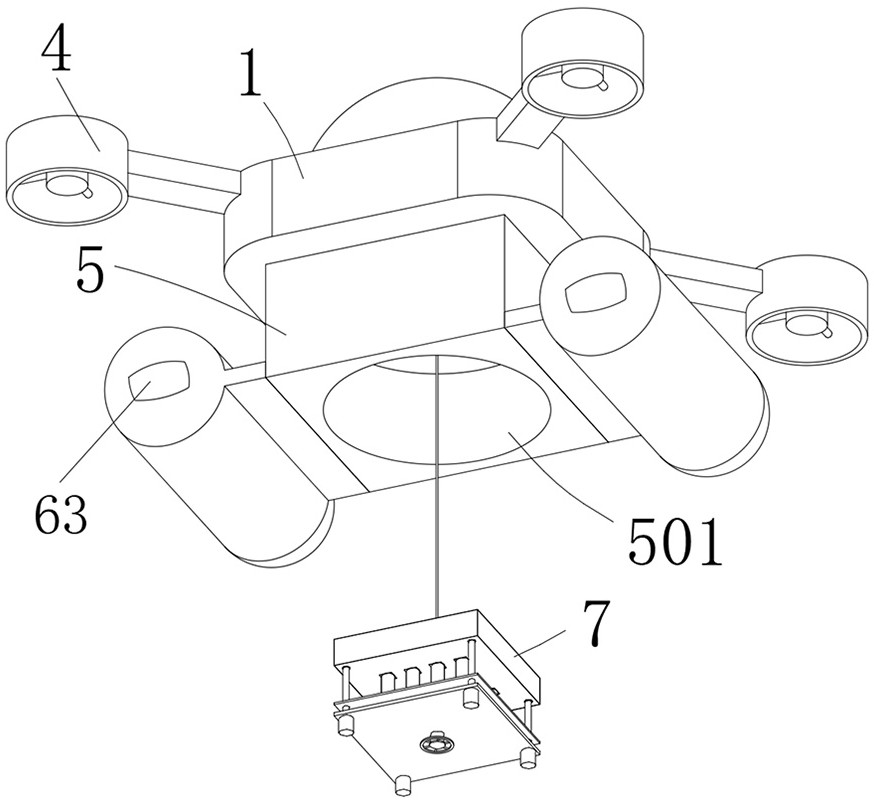
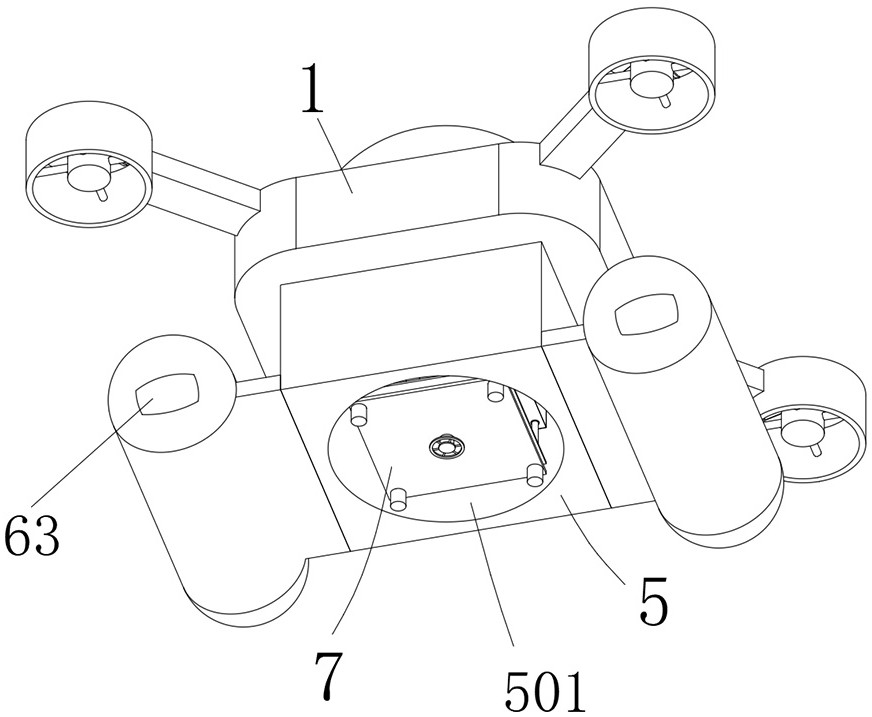
[0045] see Figure 1-5 , a seawater automatic sampling unmanned aerial vehicle, including a body 1, also includes:
[0046] The four fixed rods 3 are arranged on the outer wall of the body 1, and the ends of the four fixed rods 3 far away from the body 1 are fixedly installed with the driving blades 4, the top of the body 1 is provided with an inlet and outlet 101, and the top of the body 1 is fixedly installed with Hoist 8, a protective cover 2 is fixedly installed on the top of the body 1, and the protective cover 2 is sleeved on the outside of the hoist 8, a pipeline 9 is wound on the winding drum of the hoist 8, and a sampling device is fixedly installed on the end of the pipeline 9 away from the hoist 8. The device 7 is arranged on the storage cover 5 at the bottom of the body 1. The bottom of the storage cover 5 is provided with a storage tank 501. The storage tank 501 communicates with the inlet and outlet 101. Both sides of the storage cover 5 are fixedly equipped with...
Embodiment 2
[0048] On the basis of Example 1, please refer to Figure 3-10 , the sampling device 7 includes a switching assembly 71, an adjusting assembly 72 and a collection assembly 73, the switching assembly 71 is fixedly installed on the top of the adjustment assembly 72, the collection assembly 73 is arranged between the switching assembly 71 and the adjustment assembly 72, and the switching assembly 71 includes a top plate 711 , the top plate 711 is provided with a movable groove 712, and one side of the top plate 711 is provided with a mounting groove 713, and a driving motor 714 is fixedly installed in the mounting groove 713, and a first screw rod 715 is installed on the output shaft of the driving motor 714. The circumferential wall of the rod 715 is threadedly connected with a briquetting block 717, and two stop rods 716 are penetrated in the briquetting block 717. A fixed slot 718 is provided, and the top of the inner wall of the fixed slot 718 is provided with a telescopic sl...
Embodiment 3
[0050] On the basis of Example 2, please refer to Figure 1-10 , a kind of working method of seawater automatic sampling unmanned aerial vehicle, comprises the steps:
[0051] Step 1: Start the hoist 8, and the hoist 8 winds and retracts the pipeline 9, so that the sampling device 7 is stored in the storage tank 501 .
[0052] Step 2: start the driving fan blade 4 to make the UAV sail to the sampling area, land the UAV on the sea surface, close the driving fan blade 4, and make the UAV float on the sea surface through the floating body 6.
[0053] Step 3: Start the winch 8 to make the sampling device 7 move downward. After reaching the first sampling depth, turn on the drive motor 714, and the drive motor 714 drives the first screw rod 715 to rotate, so that the briquetting block 717 is positioned between the two limit rods 716 Move up to squeeze the top column 7338 on the right side. With the movement of the pressing block 717, the top column 7338 drives the sealing block 73...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More