

Backward thrust and negative pressure combined adsorption method for wall climbing robot and implementation thereof
A wall-climbing robot and composite adsorption technology, which is applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of difficulty in realization, complex robot posture and motion control methods, and poor mobility
Inactive Publication Date: 2010-08-18
BEIJING INSTITUTE OF TECHNOLOGYGY
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The propeller axis used by the robot using this principle must maintain a certain angle with the wall. The vertical component of the propeller thrust is used to balance the gravity, and the utilization efficiency of the thrust is high; the attitude and motion control methods of the robot are complicated.
To sum up, the problems of poor adsorption reliability, poor mobility and weak obstacle-crossing ability of wall-climbing robots on the wall surface are difficult to realize and low in reliability.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
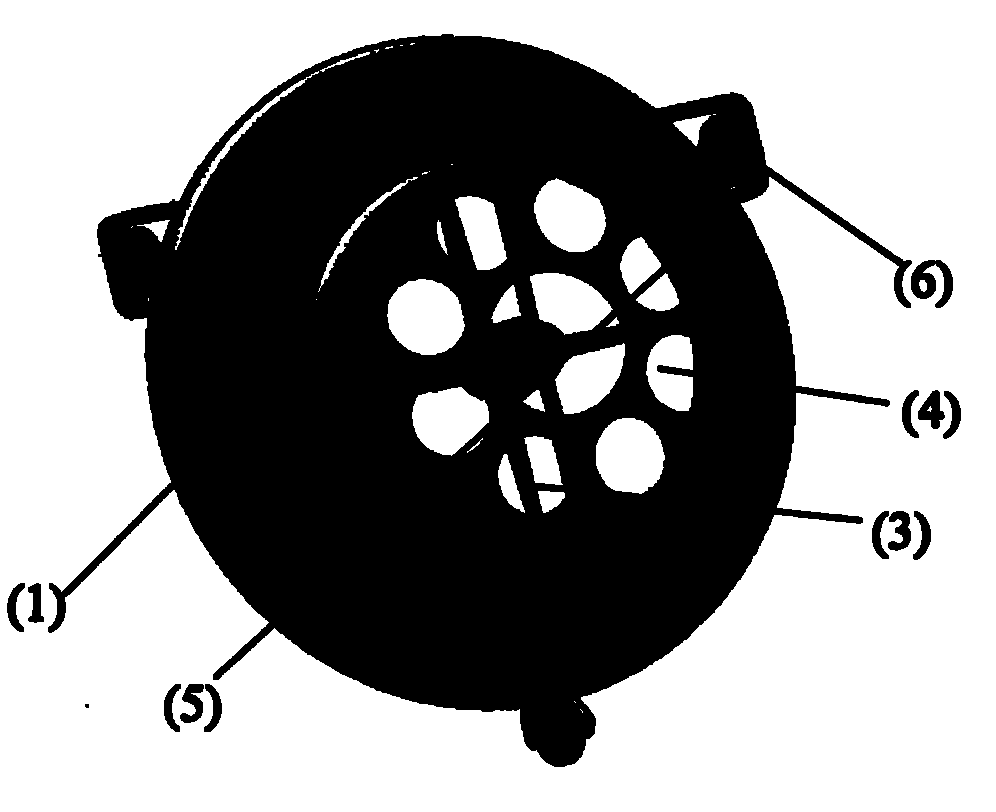
The invention relates to a reverse thrust and negative pressure combined adsorption method applied to a wall-climbing robot and realization thereof. When a suction disk(1) of the wall-climbing robot is contacted with the wall surface, air flow enters a cavity(4) of the suction disk(1) from the gap between the suction disk(1) and the wall surface through a propeller(3) rotating at a high speed in a guiding channel, and is discharged from the guiding channel (5) in which the propeller(3) on the top of the suction disk(1) is arranged, and the superimposed effect of the adsorption force generateddue to the negative pressure state in the suction disk(1) and the reverse thrust generated due to the high-speed rotation of the propeller(3) in the guiding channel is formed, so that the adsorption force between the suction disk(1) of the wall-climbing robot and the wall surface is kept in the range of enough threshold value. The robot is ensured to be dynamically adsorbed on the wall surface, and flexibly moved. By the application of the theory and the realization method, the wall-climbing robot can realize small size, light weight, low noise, energy conservation, unnecessary complex suction disk sealing device and strong obstacle crossing capability.
Description
technical field The invention relates to an adsorption method between a wall-climbing robot and a wall, in particular to a non-linear composite adsorption method for a wall-climbing robot using reverse thrust and negative pressure adsorption and its realization. Background technique The wall-climbing robot is a robot that can replace human beings in dangerous and difficult-to-reach vertical wall and other extreme environments. For example, it can be used for cleaning the exterior wall surface of high-rise buildings and detecting the construction quality of the wall surface. Implement anti-terrorist reconnaissance and surveillance, etc. Wall-climbing robots generally rely on some kind of adsorption force to make them reliably adhere to the wall and move on the wall. Here, how to reliably adsorb is very critical. At present, the adsorption methods for wall-climbing robots generally include magnetic adsorption, vacuum adsorption, negative pressure adsorption, thrust adsorptio...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B62D57/04B62D57/024
Inventor高学山李军李科杰朱炜范宁军
OwnerBEIJING INSTITUTE OF TECHNOLOGYGY