

Multipath flexible piece two-joint compound robot finger device
A technology of robot fingers and flexible parts, applied in the field of humanoid robot hands, can solve the problems of difficult end gripping effect, large deformation of multiple spring parts, lack of self-adaptability, etc., and achieves convenient assembly and maintenance and energy loss. Small, simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
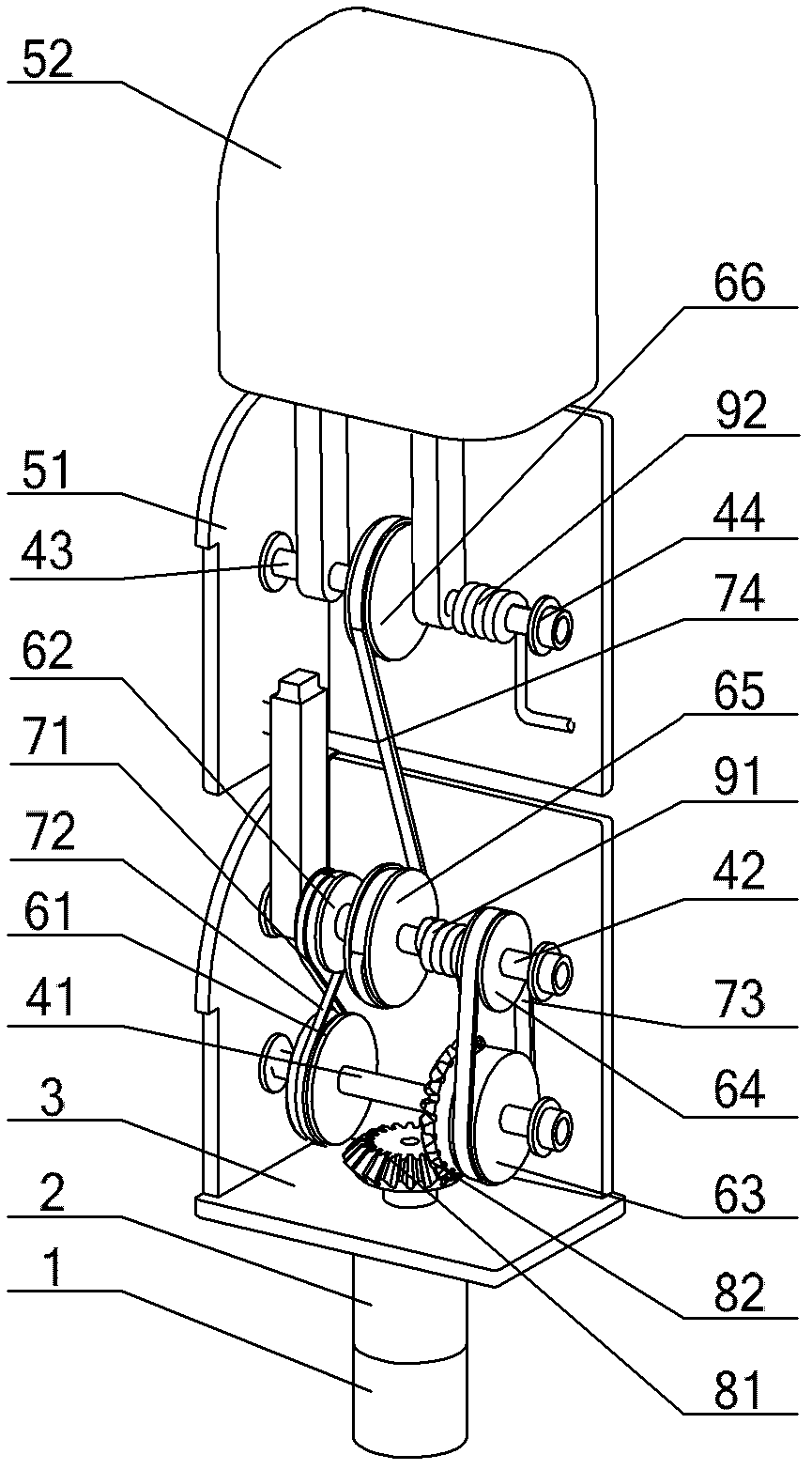
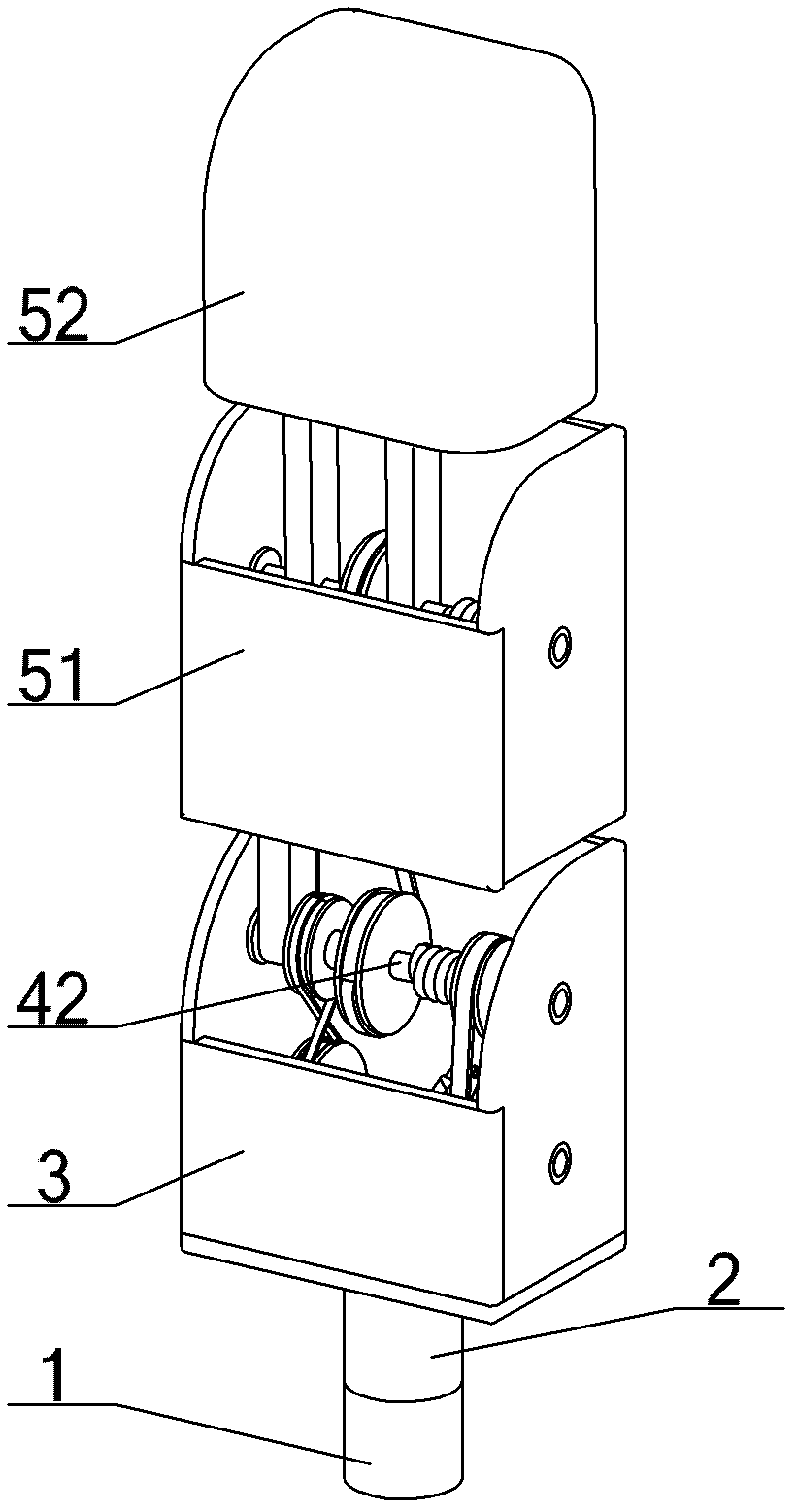
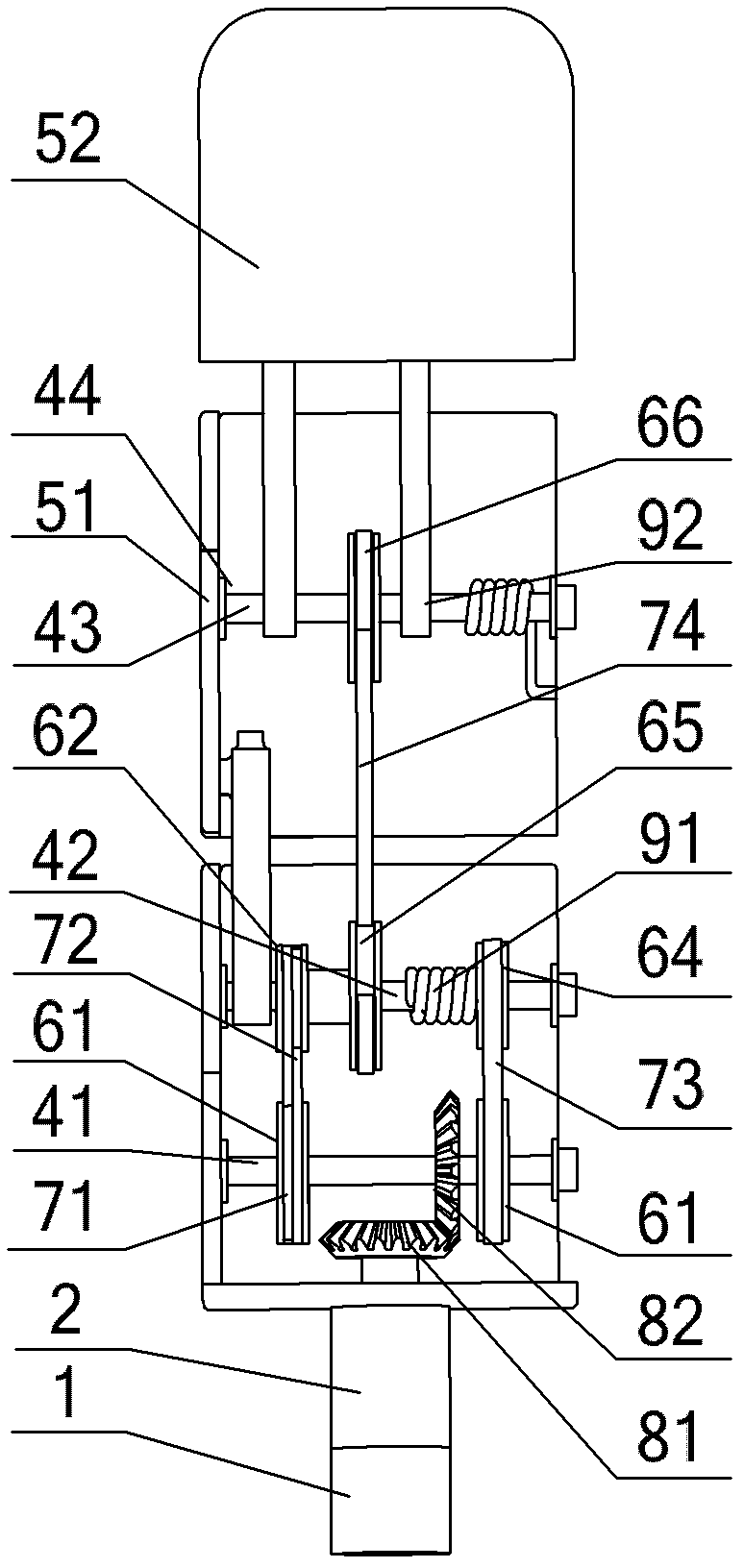
[0047] An embodiment of the multi-way flexible two-joint compound robot finger device of the present invention, as Figure 1 to Figure 4 As shown, it includes a motor 1, a reducer 2, a base 3, a proximal joint shaft 42, a distal joint shaft 43, a middle finger segment 51 and an end finger segment 52; the motor 1 and the reducer 2 are fixed on the base 3 Above, the output shaft of the motor is connected with the input shaft of the reducer; the proximal joint shaft 42 is movably sleeved in the base 3, and the distal joint shaft 43 is movably sleeved in the middle finger segment 51, and the middle finger segment 51 is sleeved and fixed on the proximal joint shaft 42; the terminal finger section 52 is sleeved and fixed on the distal joint shaft 43.
[0048] This embodiment also includes a base shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More