

Method for generating real-time gait path of biped robot
A bipedal robot and trajectory generation technology, applied in two-dimensional position/channel control and other directions, can solve the problem that the robot environment adaptive walking control cannot be fundamentally solved, and the bipedal and humanoid robots cannot be applied, so as to make up for the limitations. performance, improving real-time performance and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
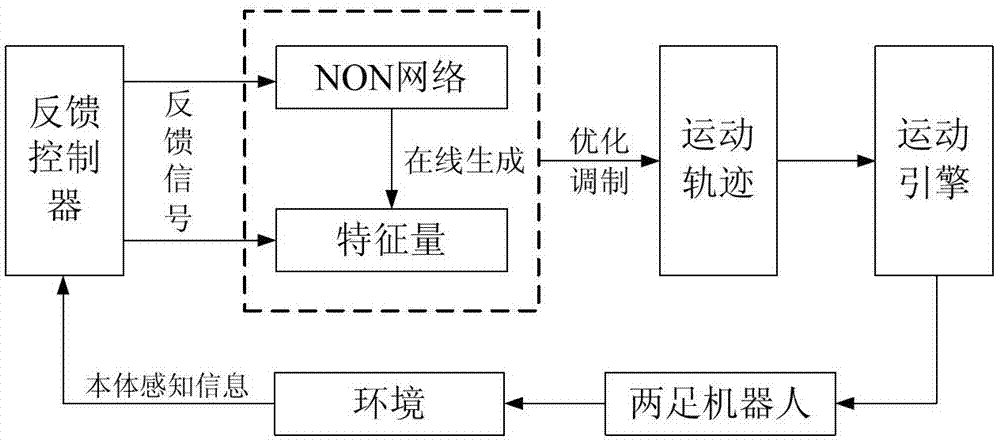
[0041] A real-time gait trajectory generation method for a biped robot. The control system architecture of this method is as follows: figure 1 As shown, it specifically includes the following steps:
[0042] 1) On-line generation of foot trajectory
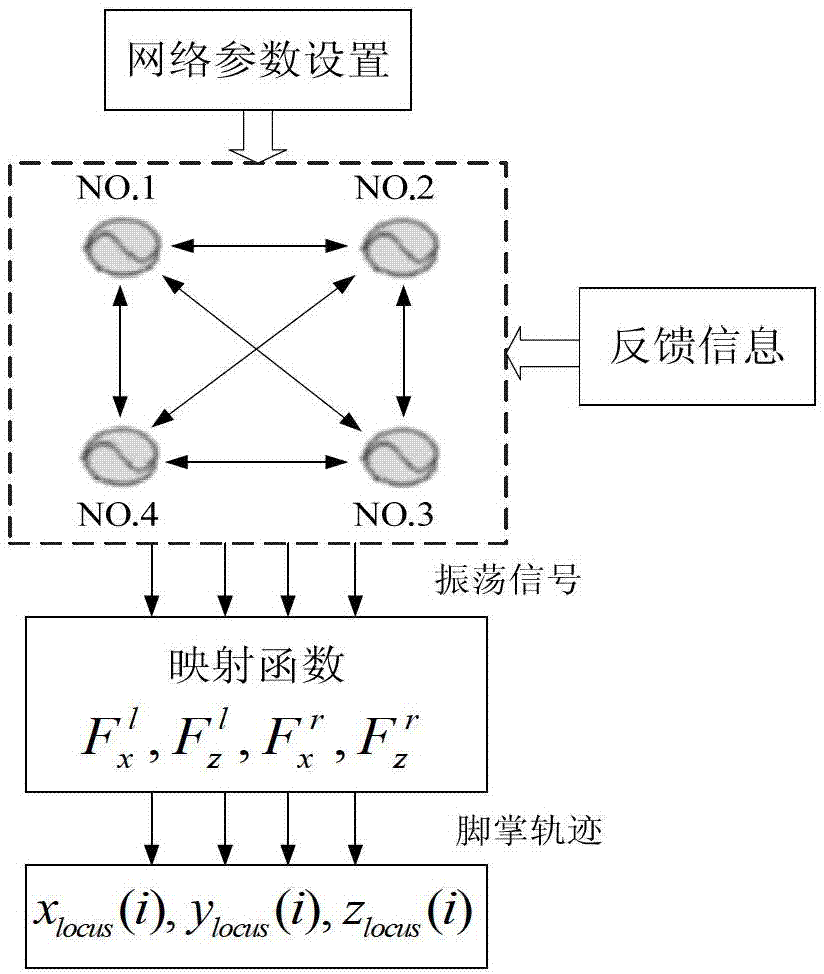
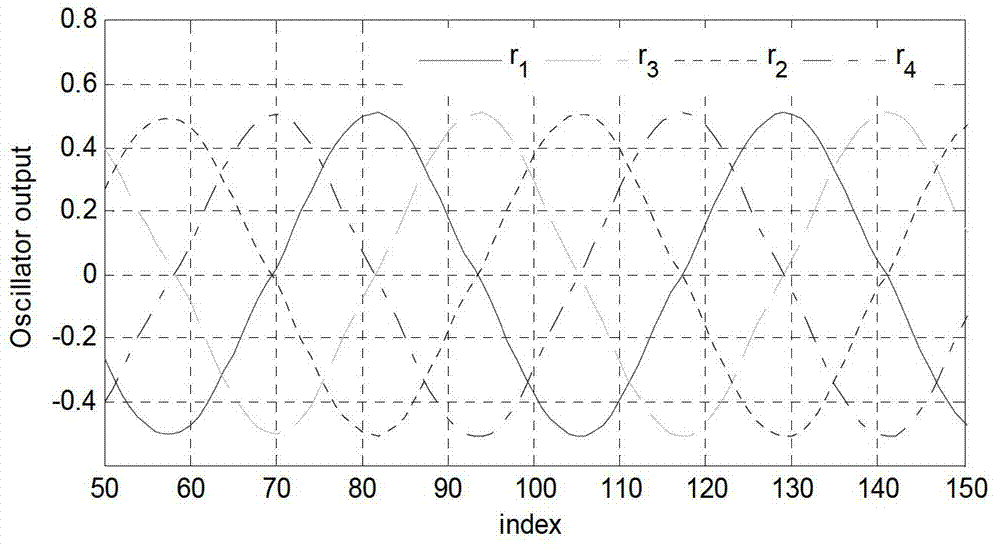
[0043] Utilize the omnidirectional coupling of four oscillating neuron units to form a neuron network that can output four oscillating signals with adjustable phase relationship, and map the output signal of the oscillating network to the foot track of the biped robot in real time by designing a mapping function .
[0044] The model of the oscillatory neuron unit is:
[0045] T r u · { e , f } i = - u { e , f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More