

Self-adaptive balance steering control method of double-hub motor driving system
A technology of motor drive system and balance control, which is applied in the direction of non-deflectable wheel steering, motor, electric vehicles, etc., and can solve problems such as complex control strategies, increased vehicle weight, and no steering balance control method for dual-wheel hub drive systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
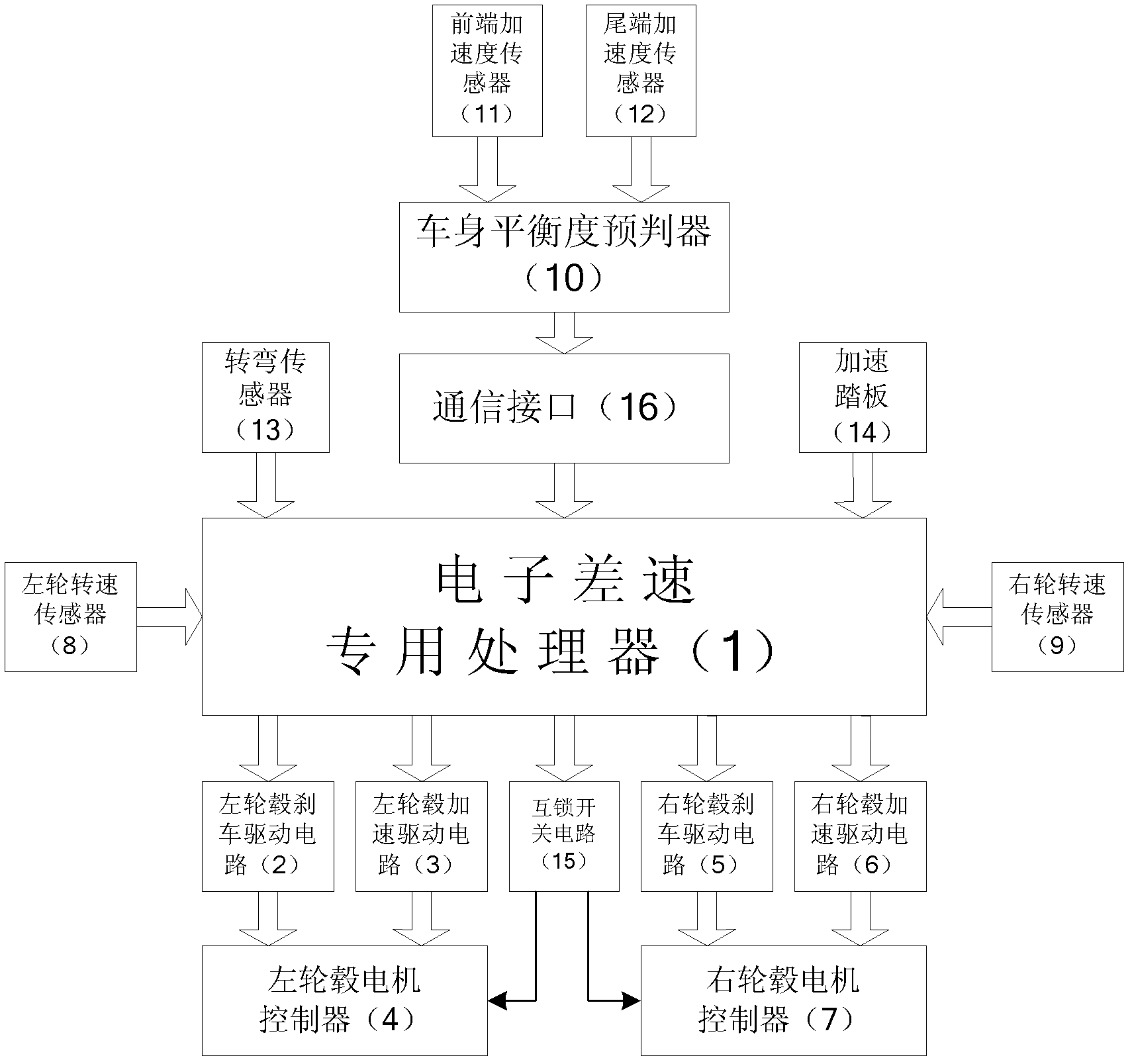
[0040] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention. The following are specific examples, see figure 1 .
[0041]The basic control system for implementing the self-adaptive balanced steering control method of the dual-hub motor drive system includes a dedicated electronic differential processor 1, a left hub brake drive circuit 2, a left hub acceleration drive circuit 3, a left hub motor controller 4, and a right hub Brake drive circuit 5, right hub acceleration drive circuit 6, right hub motor cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More