

Robot capable of implementing underwater vertical climbing
A robot and water jet propulsion technology, which is applied to underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of unreported robots, etc., and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
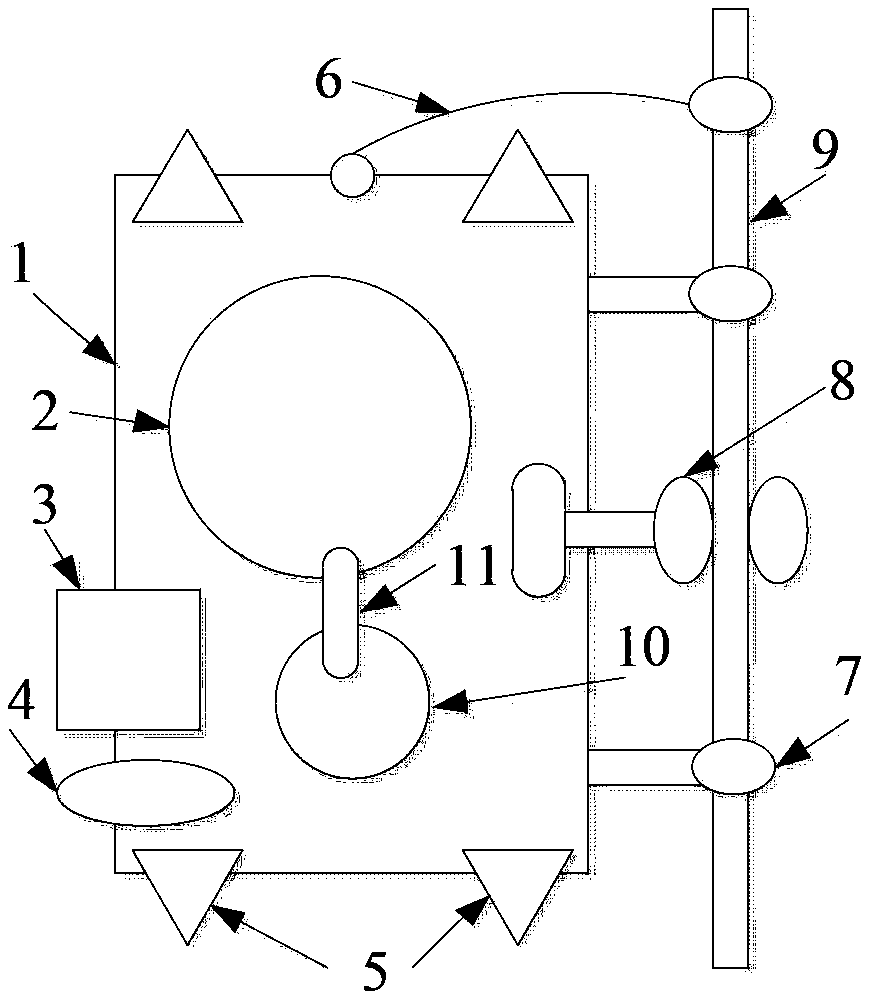
[0026] Such as figure 1 As shown, the device for intelligent interaction between people and toys described in this embodiment includes: robot housing 1, buoyancy balance balloon 2, observation window 3, sensor probe 4, water jet propulsion system 5, safety rope 6, stable Device 7, water spray fixed balloon 8, sliding cable 9, forced floating balloon 10, forced floating switch 11.
[0027] In this embodiment, the robot housing 1 refers to a carrier for carrying other components of the robot.
[0028] In this embodiment, the buoyancy balance balloon 2 refers to a device that enables the robot to offset its own gravity underwater.
[0029] In this embodiment, the sensor probe 4 refers to a sensor used to detect various physical quantities underwater.
[0030] In this embodiment, the water jet propulsion system 5 refers to a device that uses water spray to generate recoil force to propel the robot to move.
[0031] In this embodiment, the number of the water jet propulsion syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More