

A cross-beam type six-dimensional force sensor elastic body
A six-dimensional force sensor and elastic body technology, which is applied in the direction of measuring force components, etc., can solve the problems of large inter-dimensional coupling and low sensitivity, so as to eliminate the interference of axial force measurement, ensure sensitivity, improve stiffness and dynamic performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
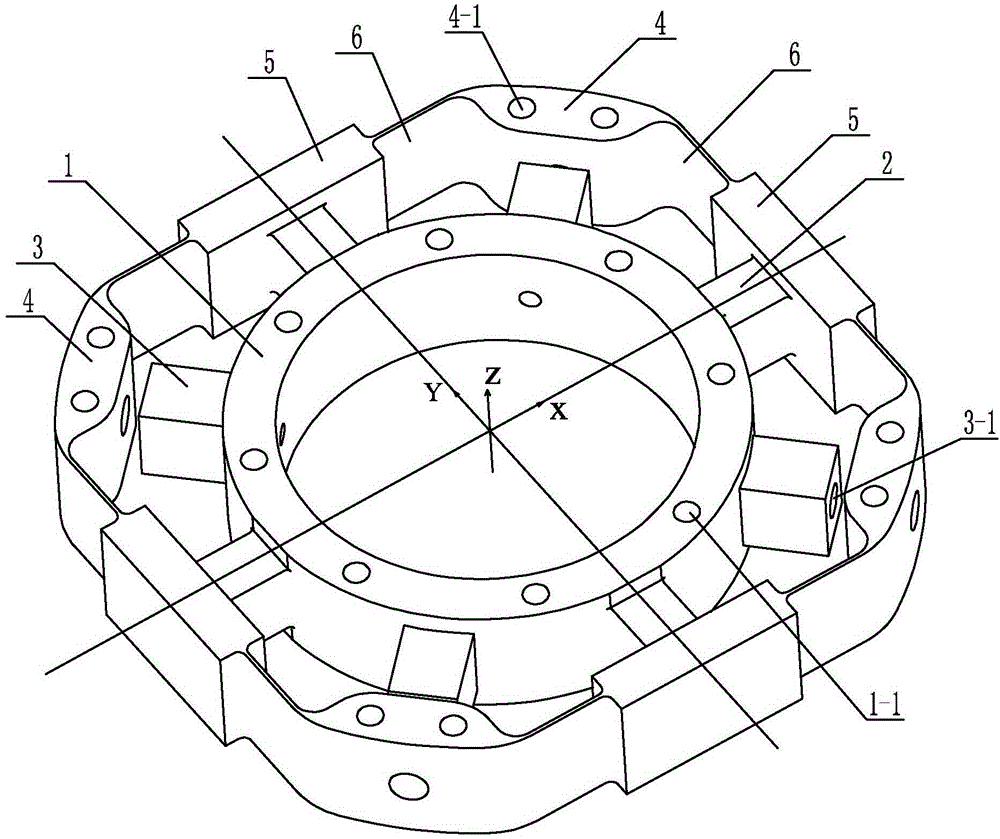
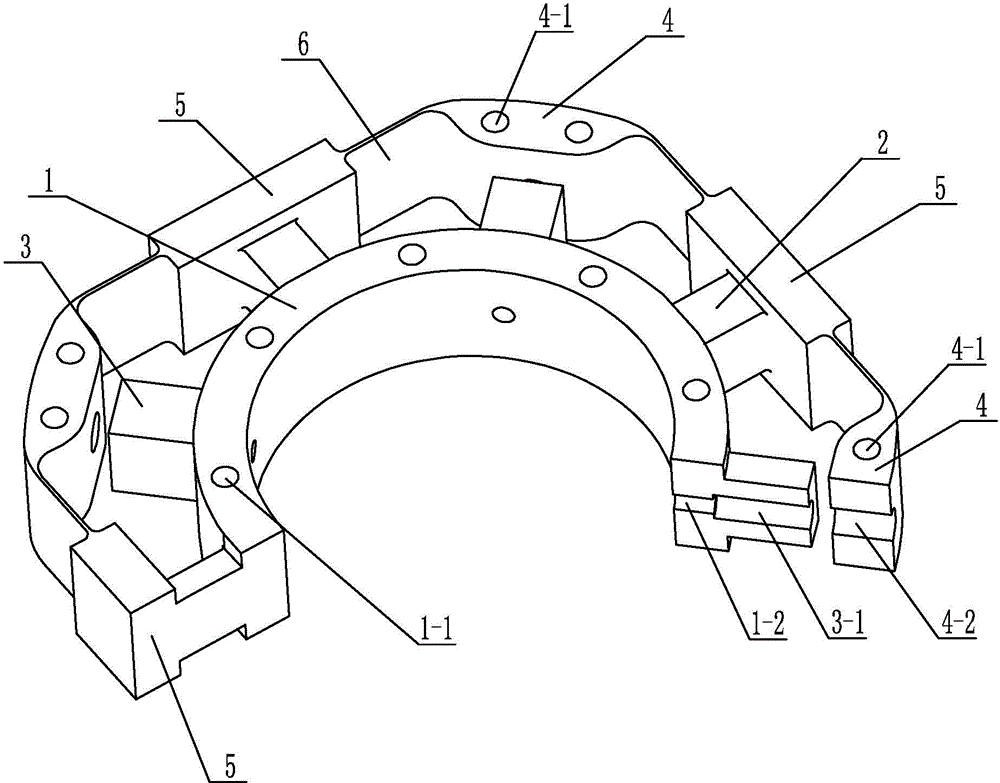
[0011] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment, this embodiment includes inner ring 1, four inner beams 2, four overload protection beams 3, four outer rings 4, four outer beams 5 and eight connecting plates 6, four inner beams 2 and Four overload protection beams 3 are evenly distributed and staggered along the outer wall of the inner ring 1, four outer beams 5 are arranged on the outside of the four inner beams 2, and the four outer beams 5 are arranged in one-to-one correspondence with the four inner beams 2, and the outer The beam 5 is fixedly connected with the corresponding inner beam 2, and an outer ring 4 is arranged on the outside of each overload protection beam 3, and an outer beam 5 is arranged between two adjacent outer rings 4, and the two ends of the outer beam 5 are respectively The outer ring 4 is fixedly connected by a connecting plate 6, two outer ring through holes 4-1 are arranged on the upper and lower e...
specific Embodiment approach 2
[0012] Specific implementation mode two: combination figure 1 with figure 2 The present embodiment will be described. The four inner beams 2 and the four overload protection beams 3 of the present embodiment are integrated with the inner ring 1 . Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0013] Specific implementation mode three: combination figure 1 with figure 2 The present embodiment will be described. The four outer beams 5 and the four inner beams 2 of the present embodiment are integrated. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More