

Three-frame four-axis inertial platform error calibration method based on navigation datum system
An error calibration and three-frame technology, applied in the field of inertial platforms, can solve problems such as errors, affecting the maneuverability and landing accuracy of missile systems, and having no direct relationship with hexahedrons
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
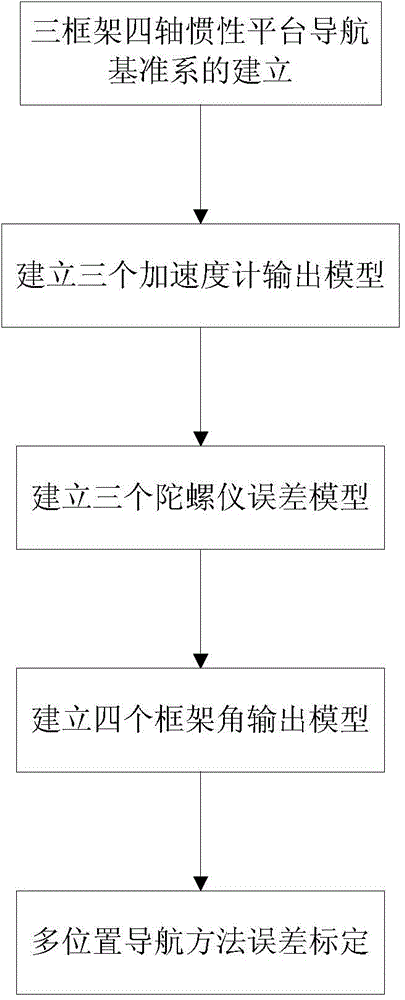
[0050] Such as figure 1 Shown, the concrete realization steps of the present invention are as follows:
[0051] (1) Establishment of the reference coordinate system
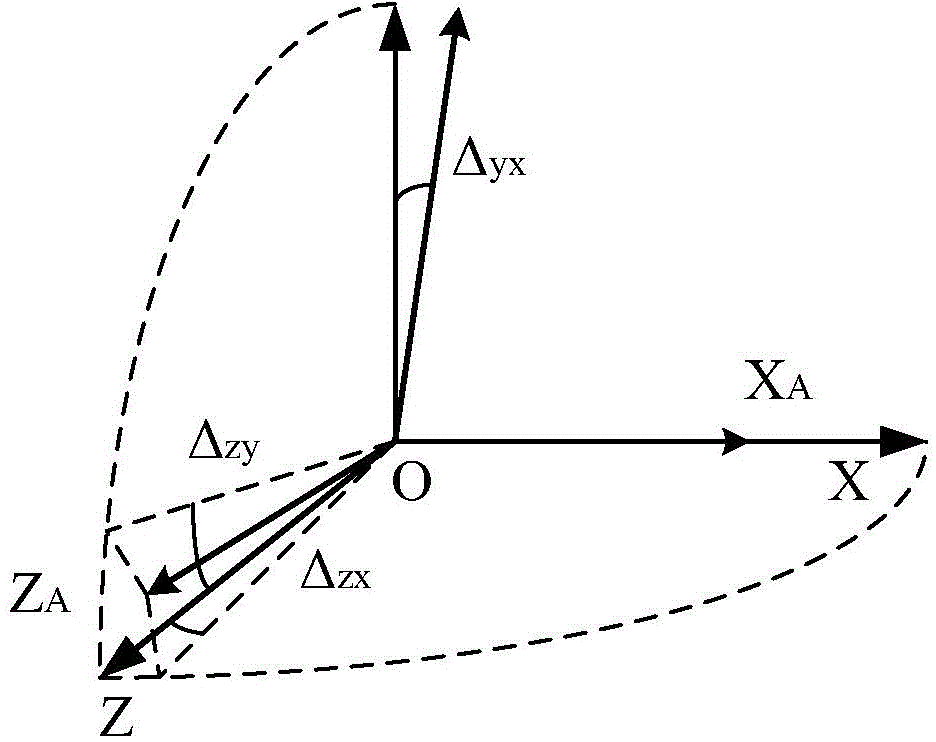
[0052] Breaking through the traditional modeling idea, according to the actual use of the three-frame four-axis inertial platform, the X accelerometer input axis actually used in the navigation process is used as the reference axis to establish the reference coordinate system OXYZ of the three-frame four-axis inertial platform system, as shown in figure 2 Shown: the OX axis coincides with the input axis of the X accelerometer, the OY axis is located in the plane determined by the OX axis and OYA, and is perpendicular to the OX axis, and the OZ axis is determined by the right-hand rule.
[0053] Since the actual navigation system rather than the optical reference is used as the reference coordinate system for calibration, this method can make the installation error calibration of the gyroscope and accelerometer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More