

Metamorphic knuckle mechanism of snake-imitation rescuing robot
A robot and joint technology, which is applied in the field of robot research and engineering, can solve the problem of single joint mechanism and other problems, and achieve the effect of not easy to damage the mechanical structure, high bearing capacity and reduced force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
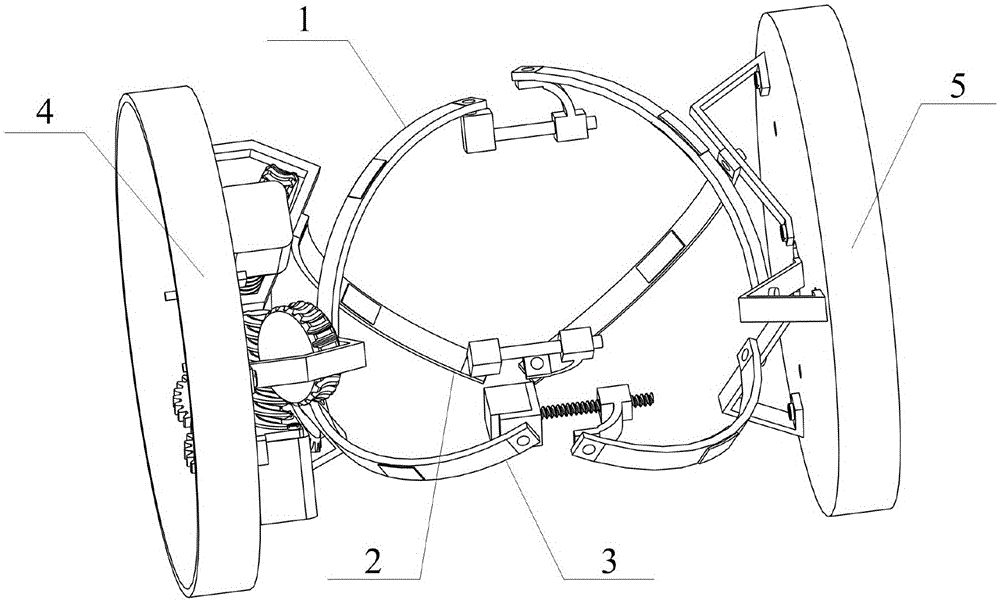
[0028] see figure 1 The modified joint mechanism provided by the present invention includes the first kinematic branch chain 1, the second kinematic branch chain 2, the third kinematic branch chain 3, the left end cover of the joint 4, the right end cover 5 of the joint, and the left ends of the first to third kinematic branch chains. The first to third revolving pairs are respectively connected with the first to third brackets in the left end cover 4 of the joint, and the tenth to twelfth revolving pairs at the right end of the first to third kinematic branches are respectively connected to the fourth to sixth brackets in the right end cover 5 of the joint connected.
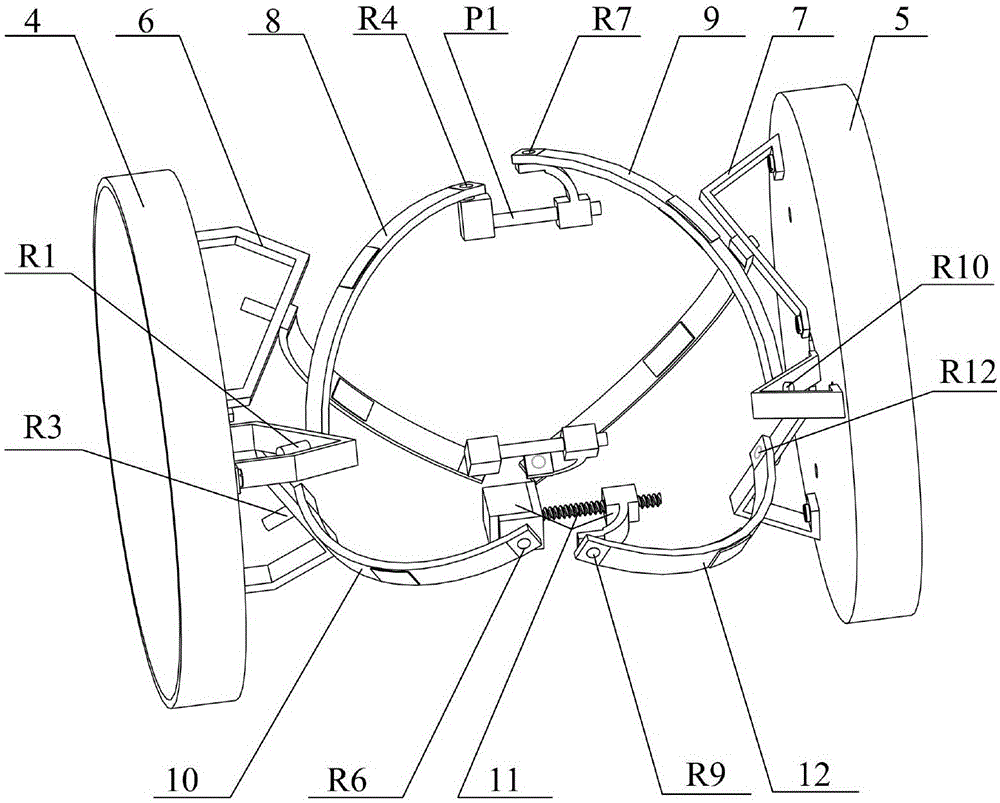
[0029] see figure 2 , the joint left end cover 4 is composed of a circular end cover and the first to third supports, the first to third supports are three identical pentagonal supports 6, and the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More