

Automatic floating device of underwater robot and method for controlling automatic floating device
The technology of an underwater robot and control method is applied to underwater operation equipment, transportation and packaging, ships, etc., which can solve problems such as power exhaustion, water leakage, and loss of working ability, and achieve increased volume, convenient operation, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings.
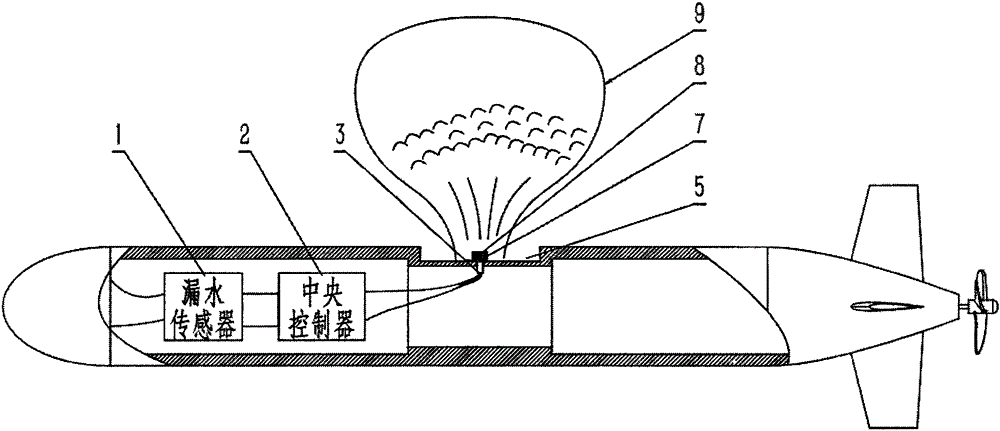
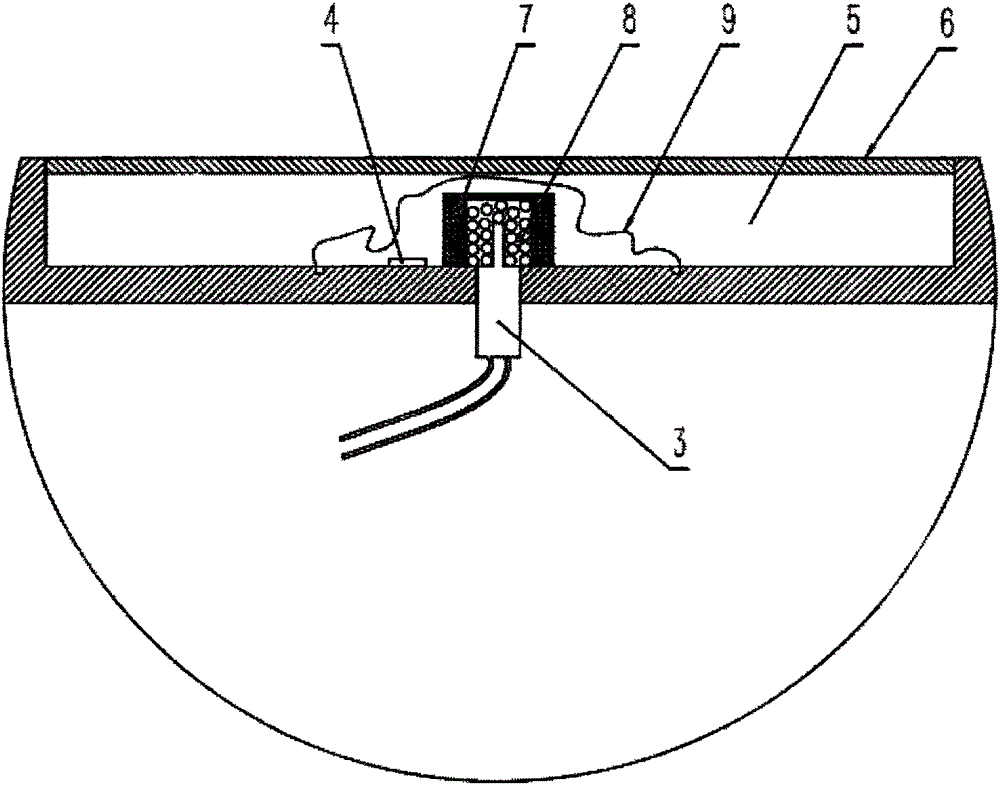
[0017] Such as Figure 2-4 As shown, the present invention consists of a water leakage sensor 1, a central controller 2, an igniter 3, a GPS locator 4, an airbag compartment 5, an airbag cover 6, a filter 7, sodium azide 8 and an airbag 9, wherein The detection head of the water leakage sensor 1 is installed on the inner wall of the cabin body that is prone to water leakage, the central controller 2 is coupled to the overall CPU, the igniter 3 is embedded on the wall of the cabin body, and the head is placed in the airbag cabin 5 miles outside the cabin At the same time, the GPS locator 4, the filter 7, the sodium azide 8 and the air bag 9 are all placed in the air bag compartment 5, and are closed by the air bag cover 6, and the air bag cover 6 is bonded to the cabin wall by a chemical adhesive Above, the GPS locator 4 is bonded to the bottom of the airbag compartmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More