

Robot vision experiment environment system based on coal mine tunnel
A technology of robot vision and experimental environment, applied in instruments, educational tools, teaching models, etc., can solve problems such as increasing mine disasters, difficulty, personal safety and property safety hazards
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
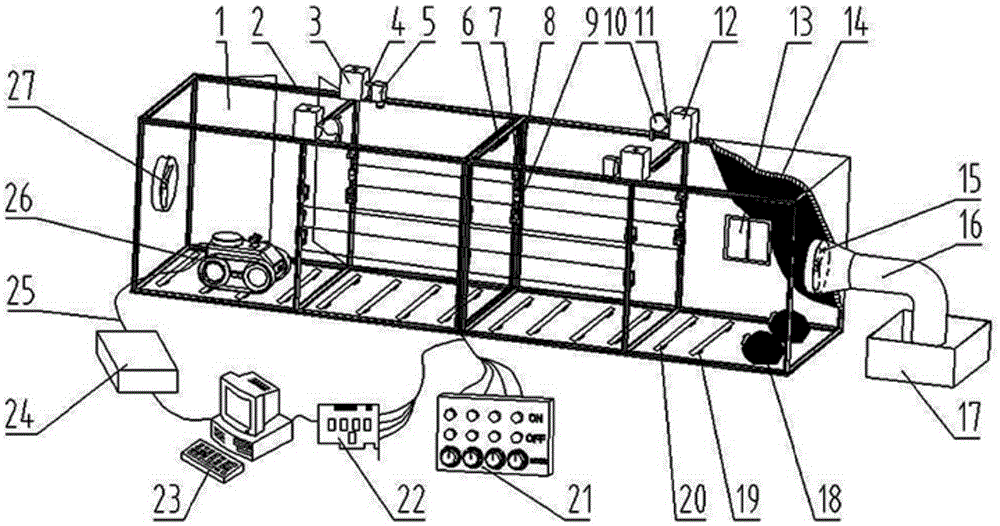
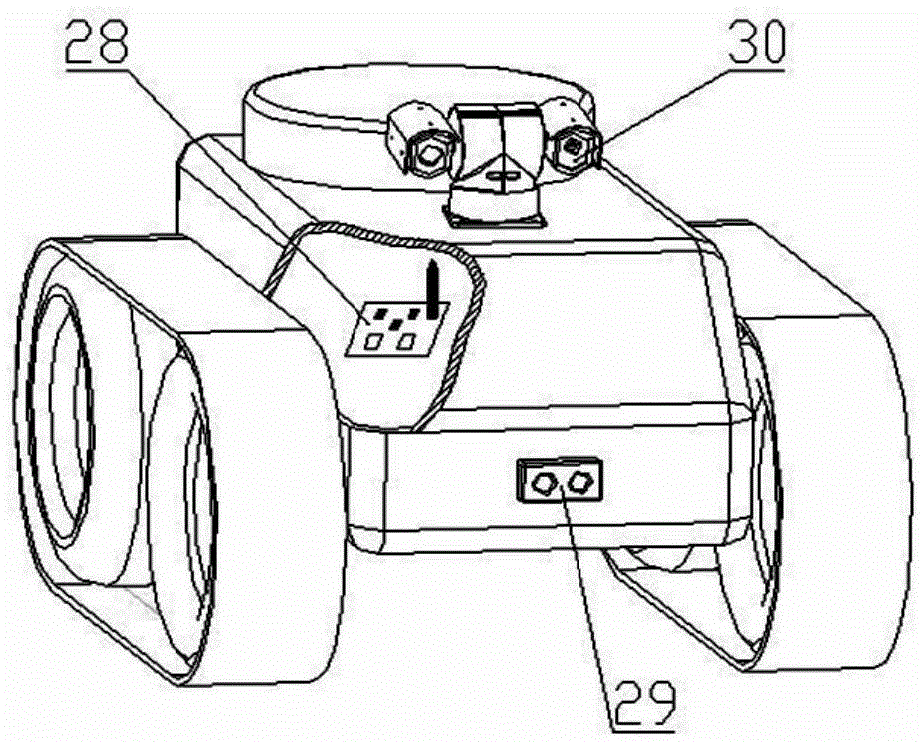
[0018] Such as figure 1 Shown is a robot vision experiment environment system based on a coal mine roadway, including a closed box structure composed of a steel structure frame 2 and a wall. The channel of the closed box structure along the length direction is used as the working channel 1 of the robot 26; In the length direction of the channel 1, pressure plates 20 are arranged at intervals on the bottom surface of the working channel 1, and a pressure detection sensor 19 is arranged below the pressure plate 20, and obstacles 8 are placed on the bottom surface of the working channel 1 according to the experimental requirements; The dust generation system, lighting system, air humidification system and dust removal and dehumidification system are arranged on the top, and the dust concentration, ambient illumination and air humidity in the working channel 1 are changed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More