

Unmanned vehicle semi-autonomous remote control method
An unmanned vehicle and semi-autonomous technology, which is applied in the field of remote control of unmanned vehicles, can solve the problems that unmanned vehicles cannot run at high speed and reduce the flexibility of unmanned vehicles, and achieve the effect of obstacle avoidance and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
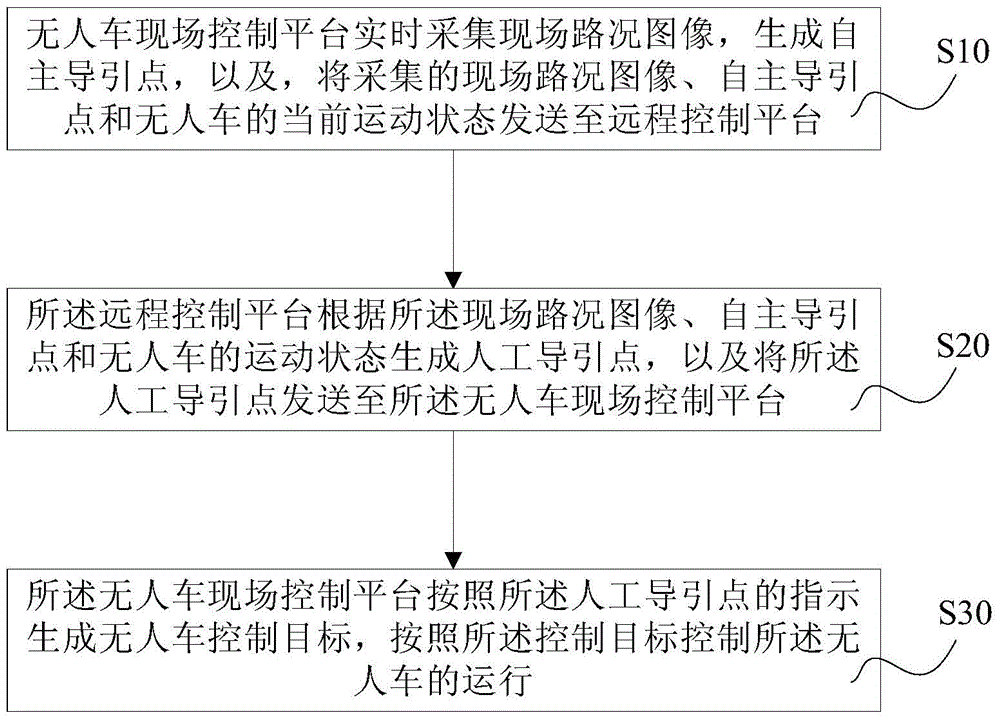
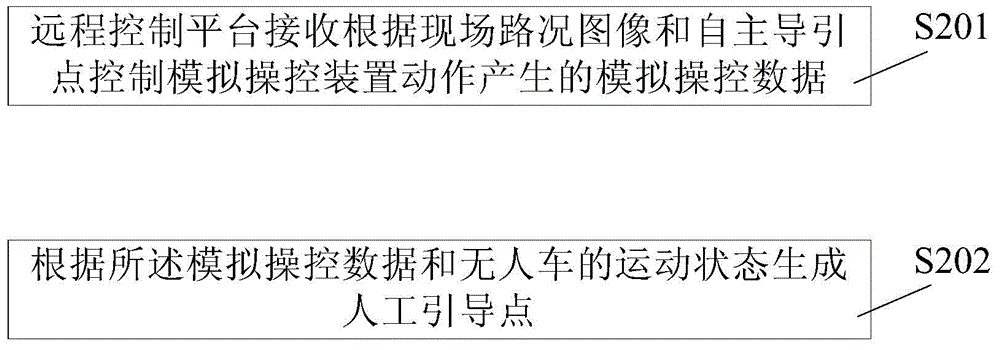
[0104] Among them, in the on-site control platform for unmanned vehicles provided in this embodiment, after the remote control platform generates manual guidance points, the guidance points need to be sent to the on-site control platform for unmanned vehicles, and the on-site control platform for unmanned vehicles will follow the manual The instructions of the guide point control the operation of the unmanned vehicle. Specifically, the implementation of sending the manual guide point to the on-site control platform of the unmanned vehicle includes:
[0105]The first implementation mode: After the remote control platform generates the artificial guidance point, the remote control platform directly sends the artificial guidance point to the on-site control platform of the unmanned vehicle. The target point of the target position (specifically, the artificial guidance point sent to the on-site control platform of the unmanned vehicle can be the position coordinate point on the on-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More