

A method for controlling mobile robots by automatically creating abstract actions
A mobile robot and motion control technology, applied in the direction of non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problems of increasing number of features, increasing algorithm complexity, and decreasing algorithm performance. The effect of accelerated learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawing and embodiment:
[0043] Example: refer to figure 1 , 2 , 5, a method for a mobile robot to automatically create an abstract action, specifically comprising the following steps:
[0044] 1) Initialize the module, set the operating environment of the robot, the reward value for reaching the goal, and the step size parameter and discount factor parameter for updating the value. The operating environment includes the boundary of the environment, the starting position of the task, the end position, and the environment The position of the fixed obstacle, each position is regarded as a state;
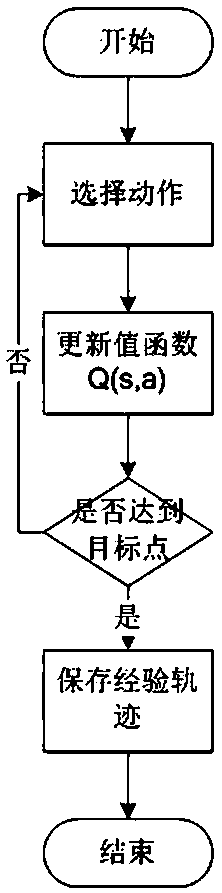
[0045] 2) The robot updates all state-action evaluation values according to the update formula of the Q learning module , and save the set of learned experience trajectories , a trajectory can be expressed as ,in Indicates the track The jth state of , and then for the obtained t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More