

A foot healthcare massage robot based on four degrees of freedom
A robot and degree-of-freedom technology, applied in vibration massage, roller massage, massage auxiliary products, etc., can solve the problems of incomplete foot contact area, insignificant massage effect, poor equipment adjustability, etc., so as to improve the massage effect. , The massage effect is obvious, the effect of increasing the vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
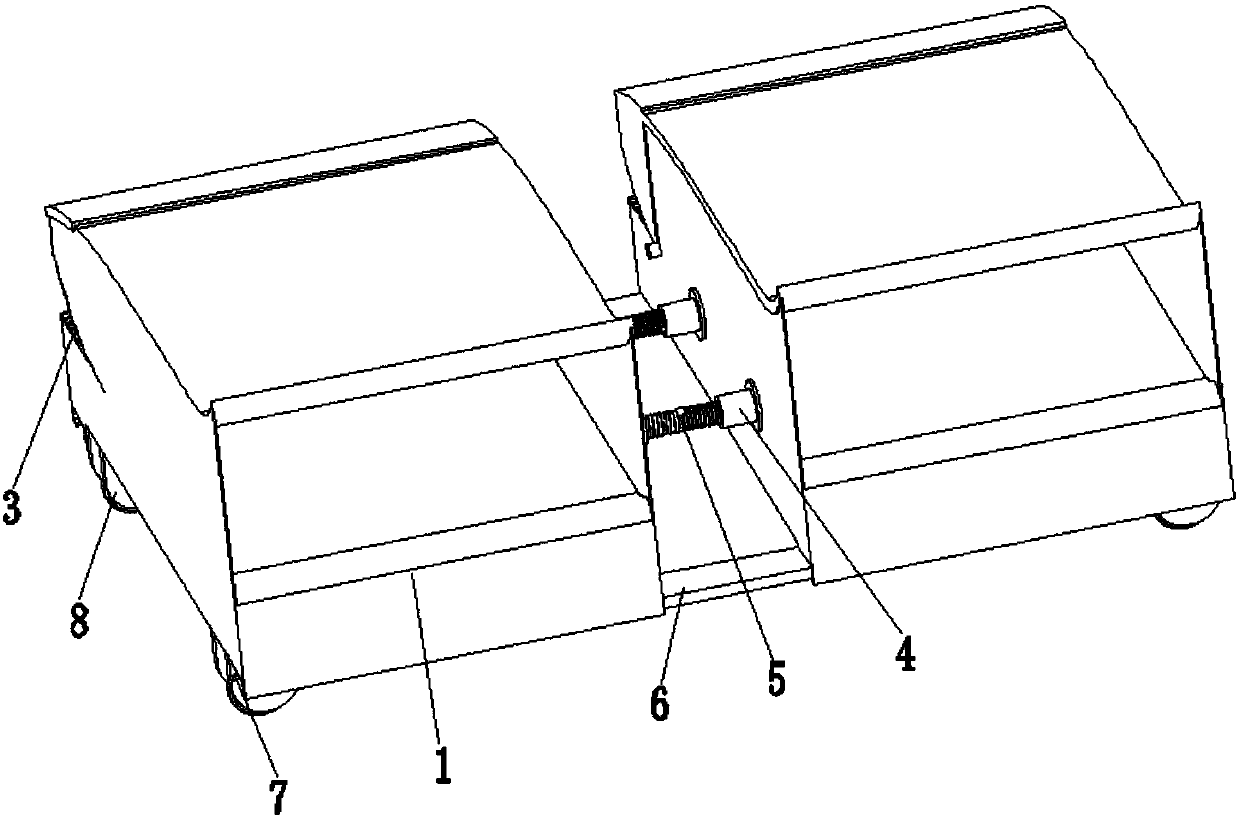
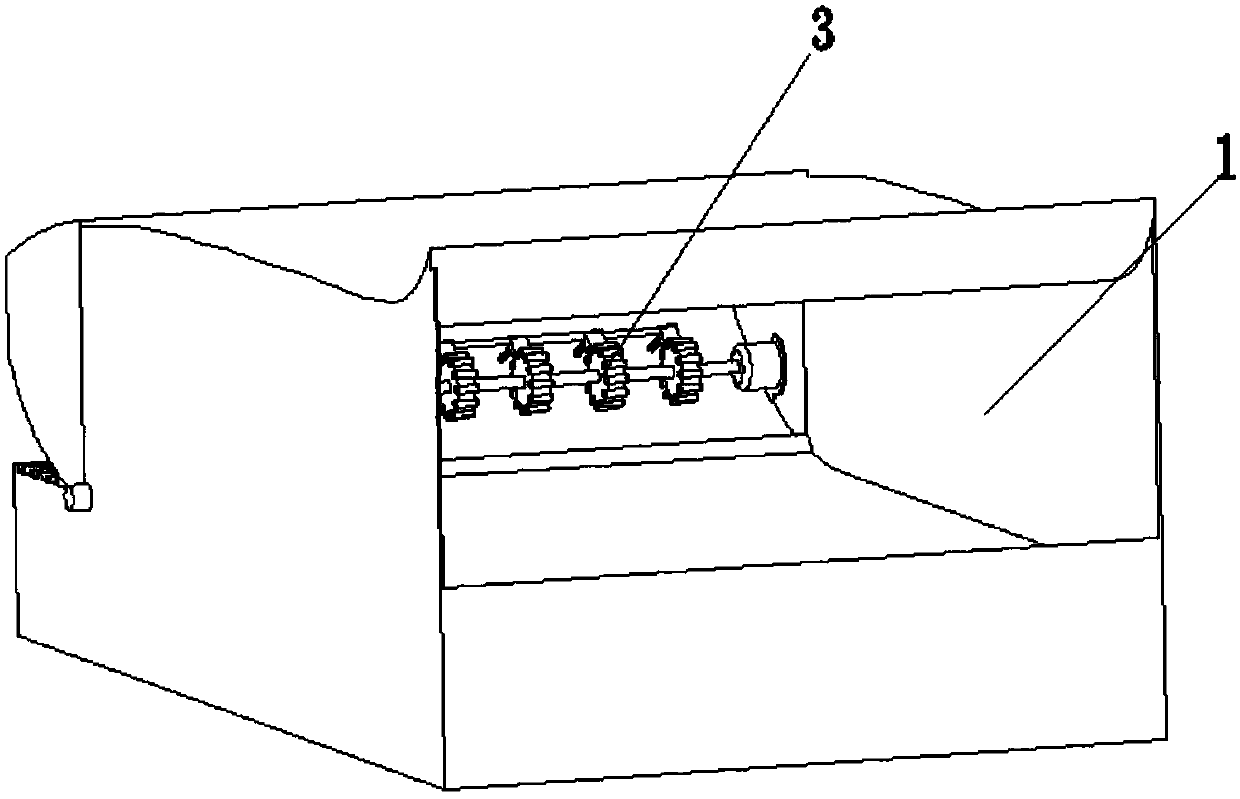
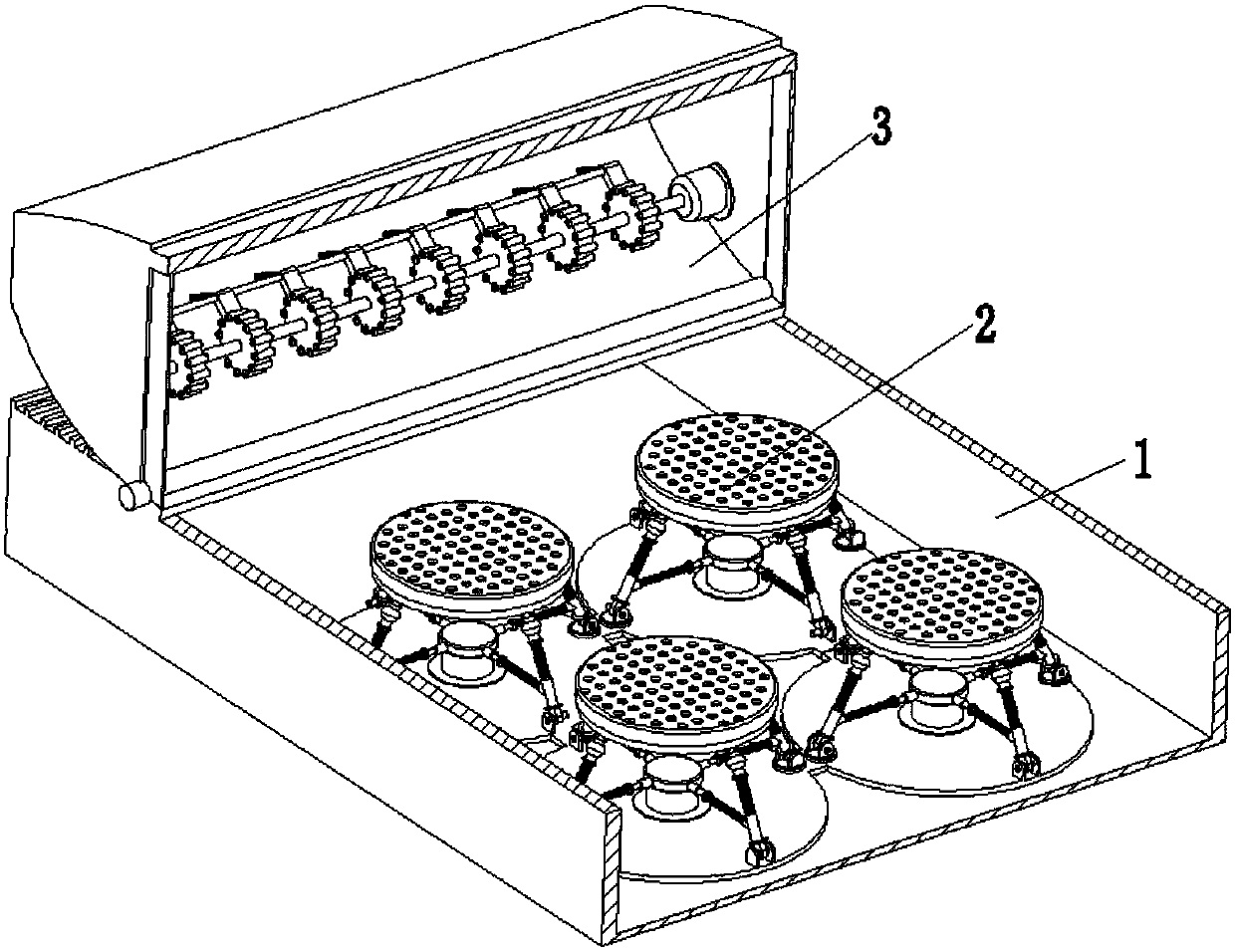
[0032] Such as Figure 1 to Figure 7 As shown, a foot health care massage robot based on four degrees of freedom includes an outer shell 1, a foot massage device 2, a toe massage device 3, a sleeve 4, an adjustment screw 5, a guide block 6, a linear guide rail 7 and a walking wheel 8. The outer casing 1 has a foot-like structure, the lower end of the outer casing 1 is provided with an installation layer, the middle part of the outer casing 1 is provided with a partition layer, and the upper end of the outer casing 1 is provided with a foot layer, and the outer casing 1 is provided with an installation layer and The foot layer is made of plastic material, and the outer casing 1 partition layer is made of flexible rubber material. The outer casing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More