

Multi-functional six-axis robot
A six-axis robot, multi-functional technology, applied in the field of robotics, can solve problems such as single function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The invention will be further described below in conjunction with the embodiments, and the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, other used embodiments obtained by persons of ordinary skill in the art without creative efforts all belong to the protection scope of the present invention.
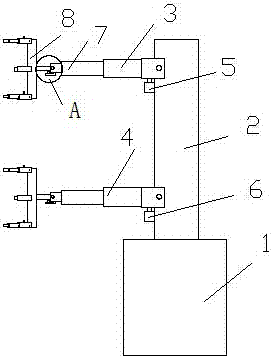
[0020] The present invention comprises a base 1 and a support 2, the support 2 is mounted on the base 1 through a bearing, the support 2 can rotate on the base 1, an upper arm 3 and a lower arm 4 are hinged on the support 2, and the support 2 is fixedly installed There are upper arm driving cylinder 5 and lower arm driving cylinder 6, the upper arm driving cylinder 5 is connected to the upper arm 3, the lower arm driving cylinder 6 is connected to the lower arm 4, the upper arm driving cylinder 5 drives the upper arm 3 to rotate up and down around the hinge point, and the lower ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More