

Flexible pneumatic gripper with force feedback and stroke
A technology of force feedback and pneumatic clamping, applied in the field of robotics, can solve problems such as object falling off, safety hazards, and difficult control, and achieve the effects of increasing the dimension of control, enhancing adaptability, and ensuring synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
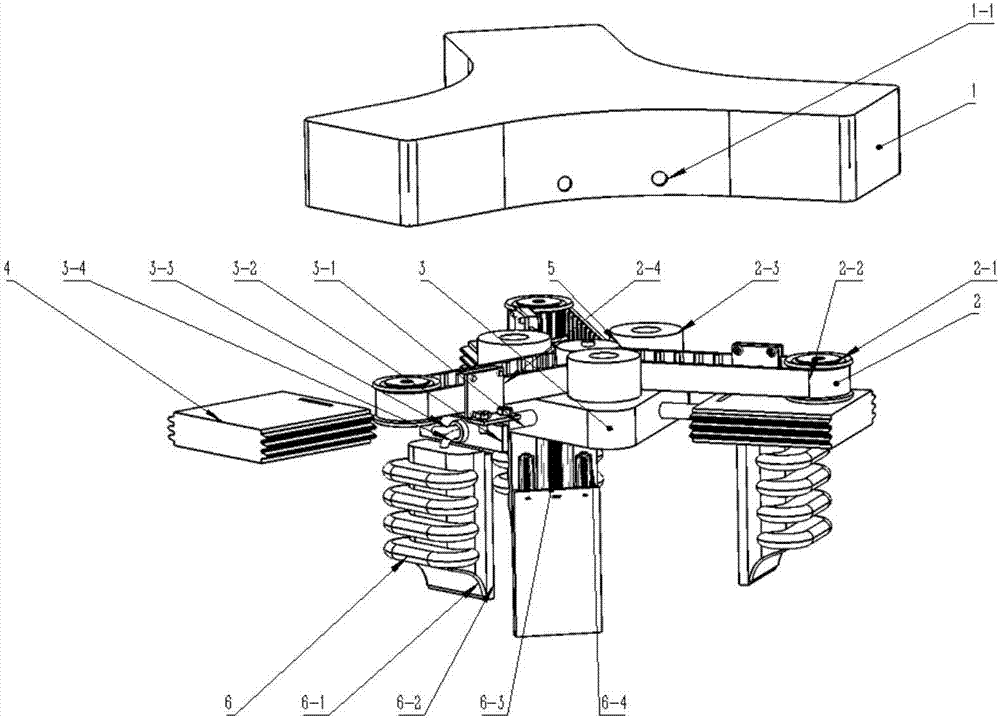
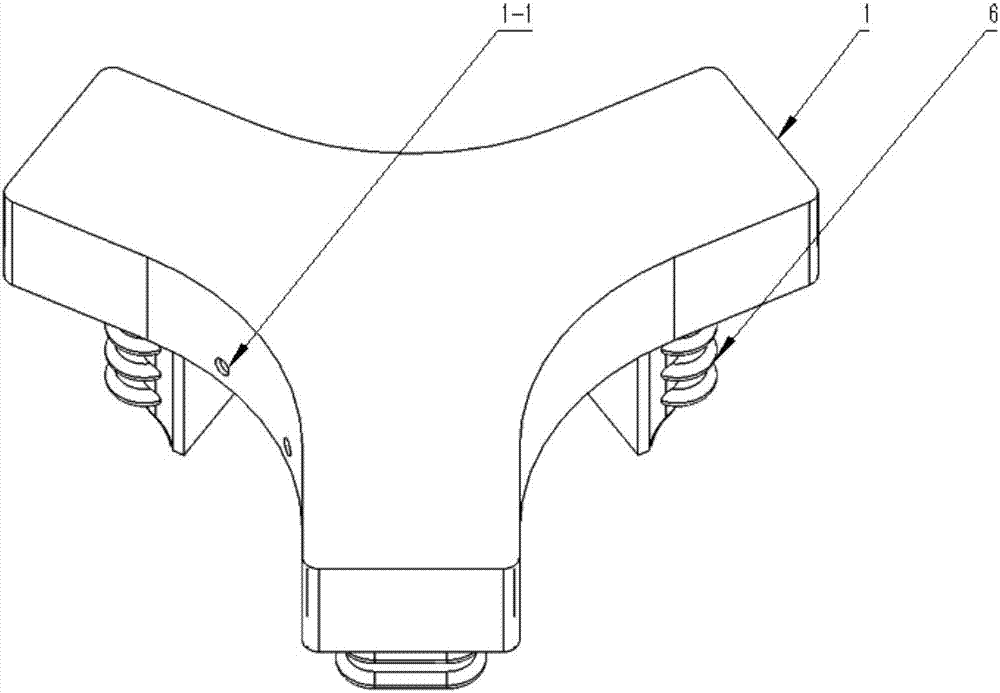
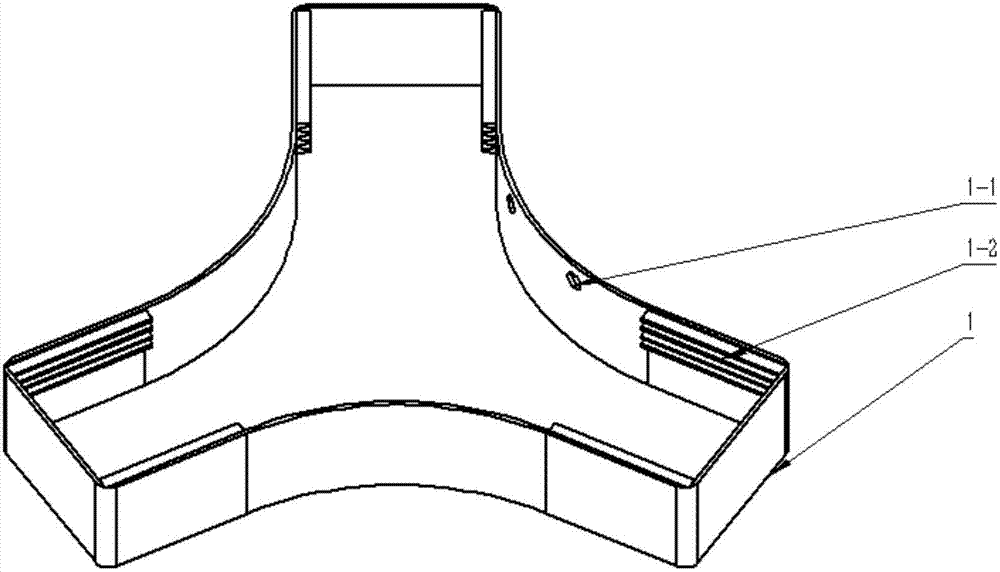
[0029] see Figure 1-Figure 9 , a preferred embodiment of the present invention, the described flexible pneumatic gripper with force feedback and stroke includes a top shell 1, a timing belt unit 2, an intermediate air cavity 3, three sliders 4, and a tension sensor 5 and finger 6. Among them, there are two ports 1-1 connected with the air source on the top shell 1. The purpose of separating air inflation and air extraction here is to realize the self-locking function by using a one-way valve. The circumferential direction is evenly distributed to form an equilateral triangle, and each slider 4 is provided with a chute 1-2, and the slider 4 can slide toward or away from ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More