

Maneuvering target tracking system capable of processing Doppler measurement on basis of predicted value and maneuvering target tracking method capable of processing Doppler measurement on basis of predicted value
A technology of maneuvering target tracking and prediction value, applied in radio wave measurement systems, measurement devices, radio wave reflection/re-radiation and other directions, can solve the problems of biased state estimation, not considering target maneuvering characteristics, Kalman gain dependence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
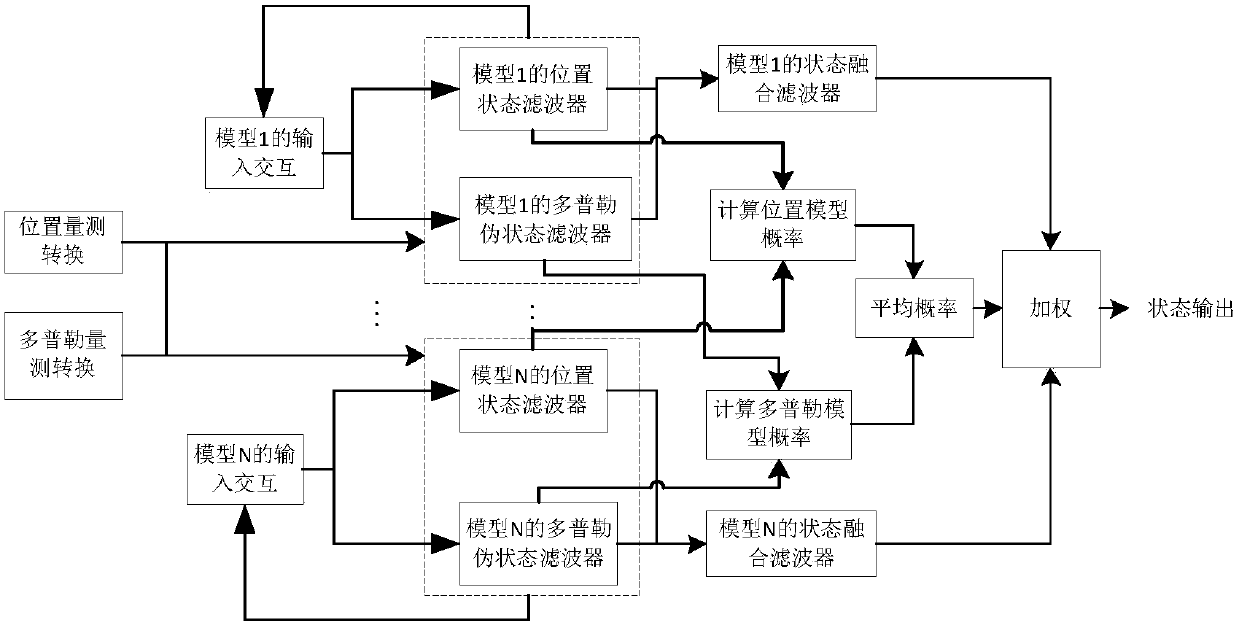
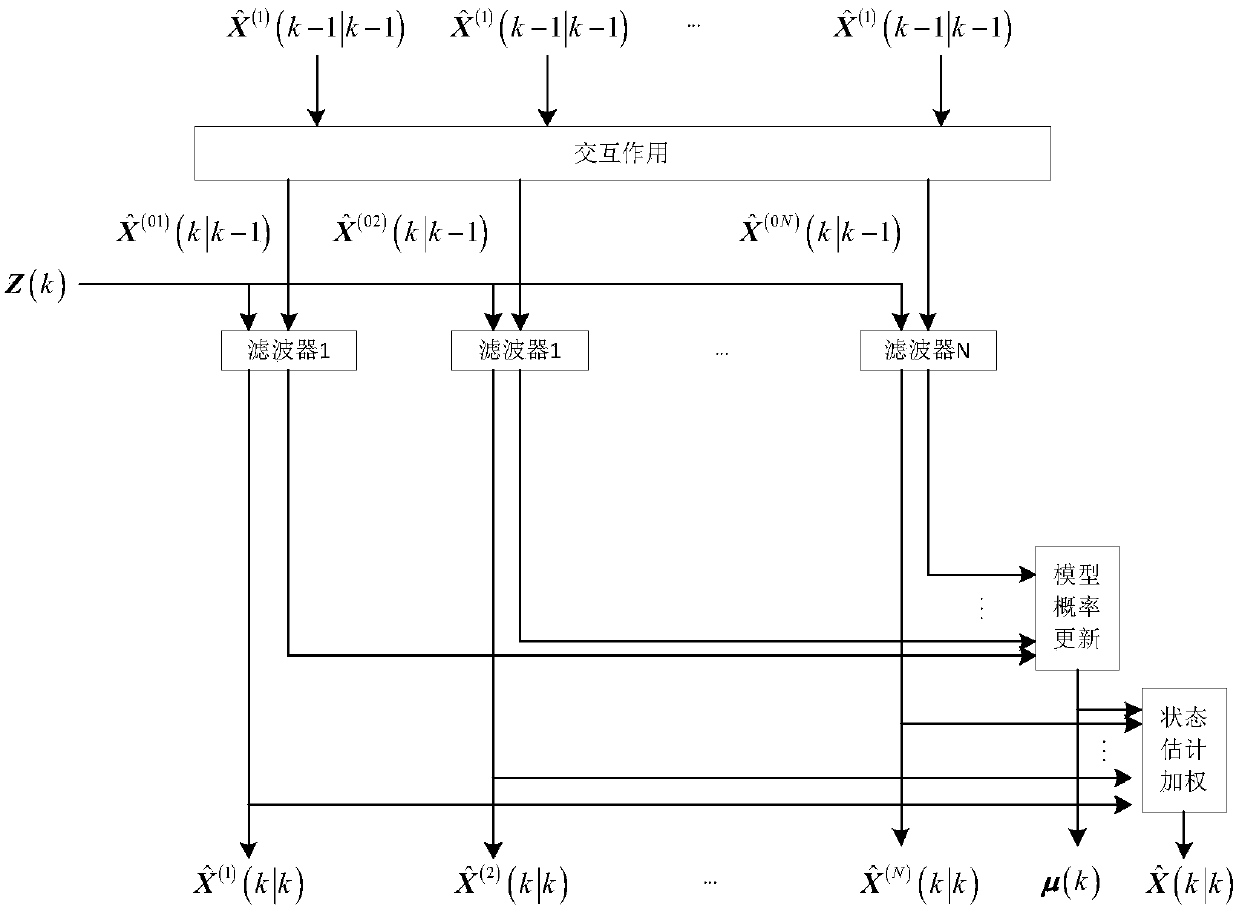
[0113] Each filter of the interactive multi-model in the present invention uses a state fusion method based on predicted values. Firstly, the measured values are unbiased based on the predicted value; then, based on the minimum mean square error criterion, the position and Doppler pseudo-state of each model are fused to obtain the state estimation results of each model; secondly, the position and Doppler pseudo-states are estimated and filtered, and their new information and their covariance are used to calculate the model probability of position and Doppler respectively, and then calculate the mean value to obtain the updated model probability; finally, use the updated model probability for each The state estimation results of the model are weighted to obtain the target final state. Therefore, the principle of the above method is mainly divided into three aspects, namely, the measurement conversion method based on the predicted value, the interactive multi-model method and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More