

Movable robot capable of picking and placing golf balls
A golf ball and robot technology, applied to balls, rackets, sports accessories, etc., can solve the problem of inconvenient human picking and releasing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0012] The invention provides a mobile golf pick-up and release robot, which can be controlled manually or automatically according to the actual situation of the golf course to replace the manual pick-up and release operation, thereby reducing the corresponding labor cost.
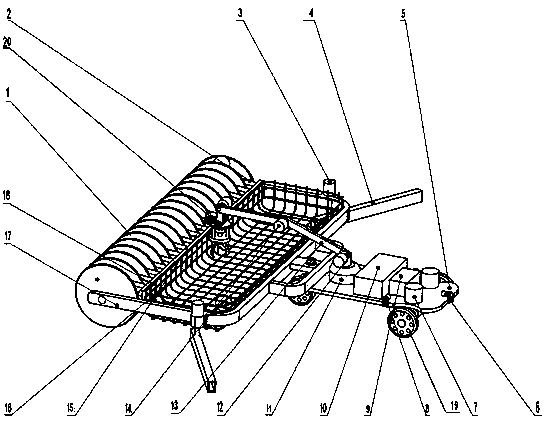
[0013] As an embodiment of the present invention, the present invention provides a mobile golf ball picking and releasing robot, including a ball picking blade 1, a ball unloading block 2, a ball collecting arm drive motor 3, a ball collecting arm 4, and a ball releasing vehicle chassis 5, front wheel steering drive 7, controller 9, battery 10, arm drive motor 11, steering shaft 12, extension arm 13, catch ball claw 16, support frame 17, put ball net 18 and put ball car driving wheel 19, so The ball net 18 is fixed in the support frame 17, and the front side of the support f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More