

Yawing motion control method of four-wheel distribution type drive coach
A motion control and distributed technology, applied in the direction of electric vehicles, control drives, control devices, etc., can solve problems such as insufficient vehicle control, and achieve the effect of ensuring driving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Specific embodiments of the present invention will be described below with reference to the accompanying drawings.
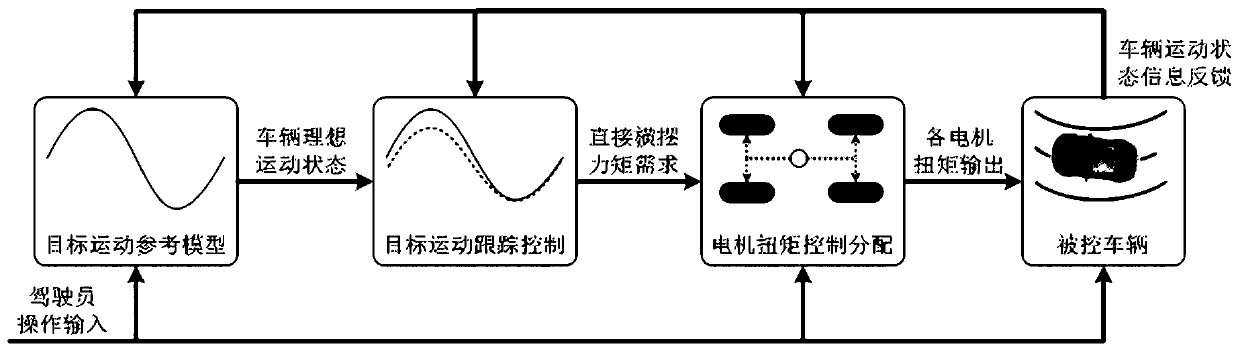
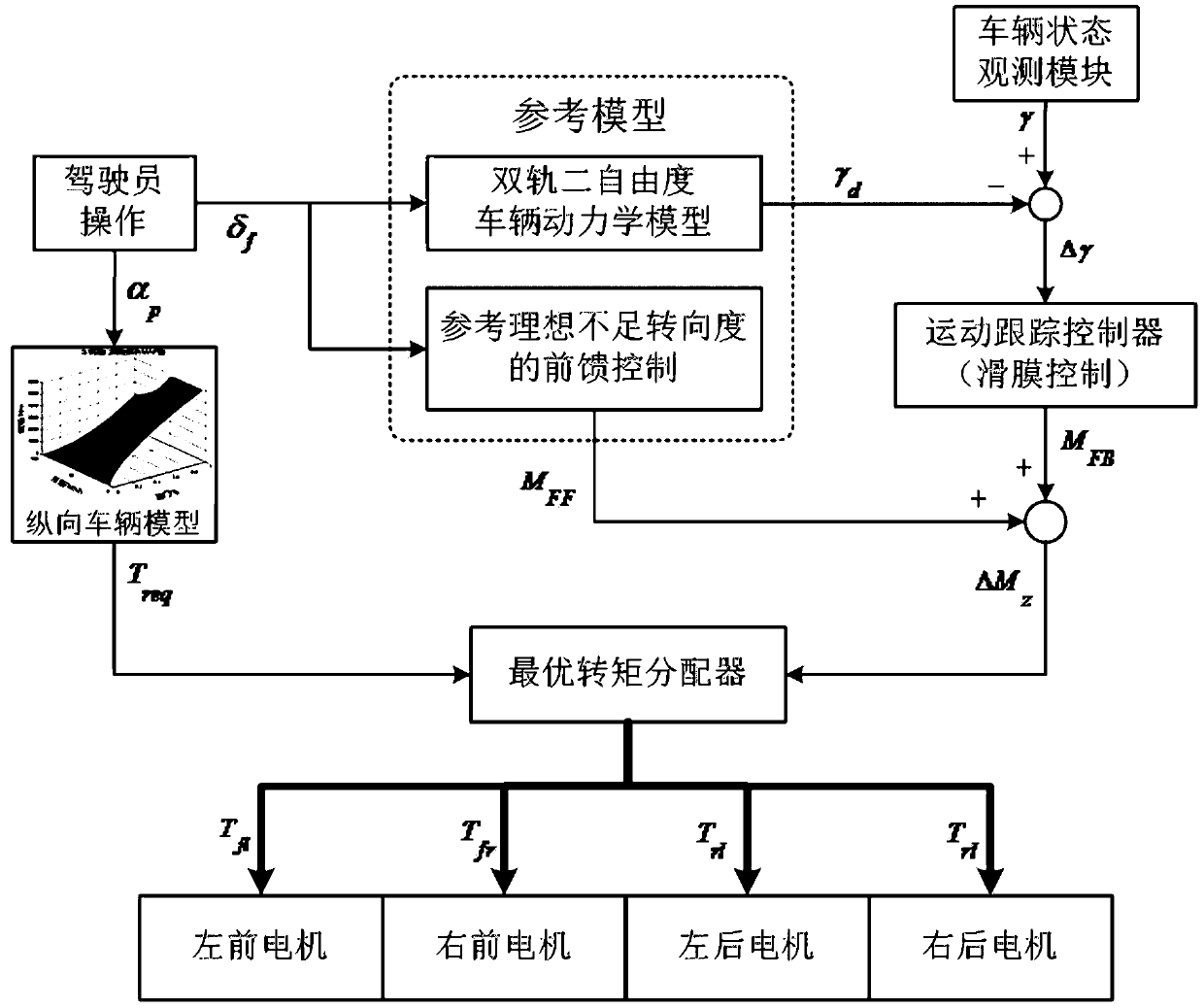
[0026] Such as figure 1 with figure 2 As shown, the present invention adopts the idea of layered control to design a torque vector control algorithm for distributed drive electric vehicles. Using hierarchical control can effectively solve the relationship between vehicle dynamics and tire dynamics in the vehicle handling stability control problem. Specifically, the control system is composed of two control layers. The upper layer of the control system is the motion tracking layer, which adopts the feedforward control based on the front wheel rotation angle and the tracking control algorithm based on the motion model. According to the driver's input signal (accelerator pedal stroke, steering wheel angle, etc.), vehicle current state feedback, ideal state of the reference vehicle model and other information, calculate the required generalized control f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More