

A nonlinear light gray model identification and correction method for tilt-rotor unmanned aerial vehicles
A technology of tilt rotor and linear model, which is applied in the direction of instrumentation, adaptive control, control/regulation system, etc., and can solve problems such as coupling and influence, airflow disturbance and complex changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
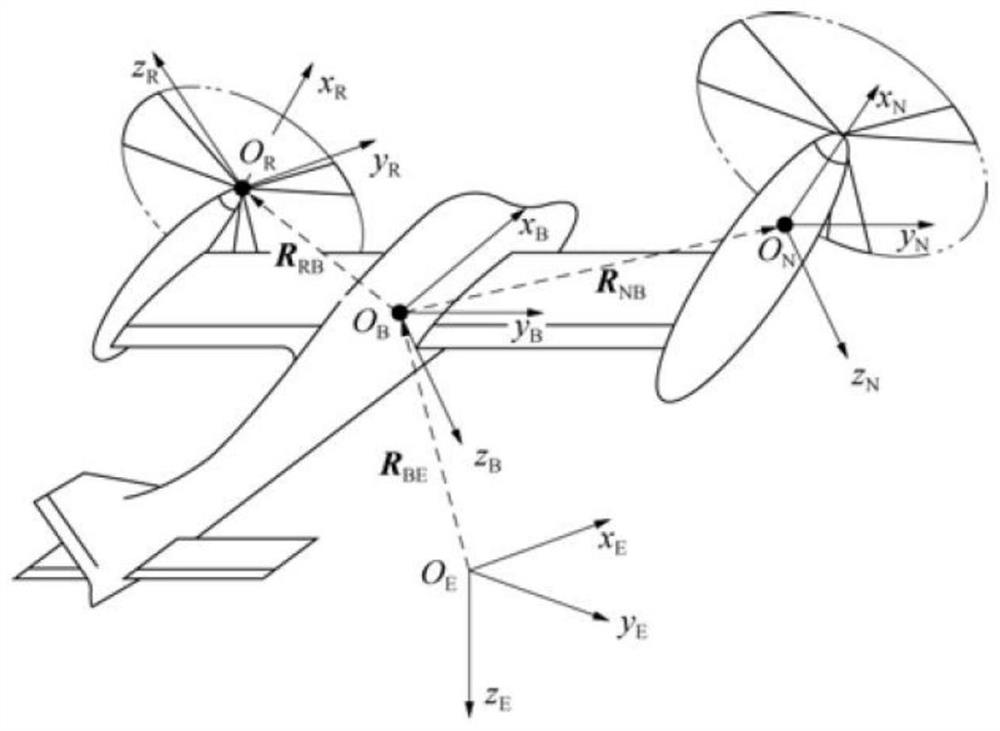
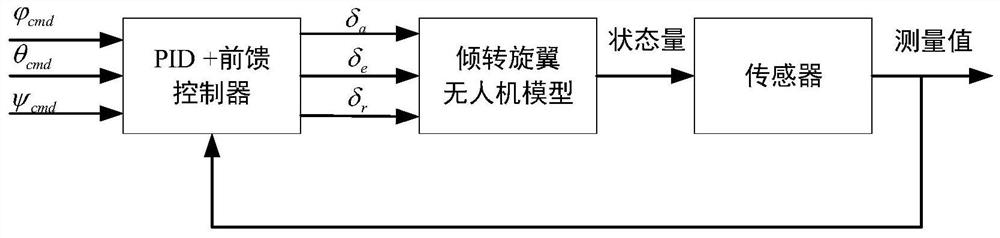
[0031] The present invention first gives the non-linear light gray model of the tilt-rotor UAV through mechanism analysis, and determines the identification model structure according to the identification requirements after linearization; then carries out the identification scheme design, including the design of the input signal, data sampling frequency and data length Then, based on the flight test data, use CIFER software to obtain the linear model of the tilt rotor UAV in each mode; finally use the identification results to correct the nonlinear light gray model, Including model parameters and model results, if necessary, iterate this process until the parameters and structure of the final nonlinear model after linearization are consistent with the identification model.
[0032] The present invention will be further described below in conjunction with the accompanying drawings and examples. It should be understood that the following examples are intended to facilitate the un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More