

Mobile robot assembly and mobile robot multi-machine cooperation carrying system
A mobile robot and robot body technology, applied in the field of mobile robots, can solve problems such as poor road adaptability and complex structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
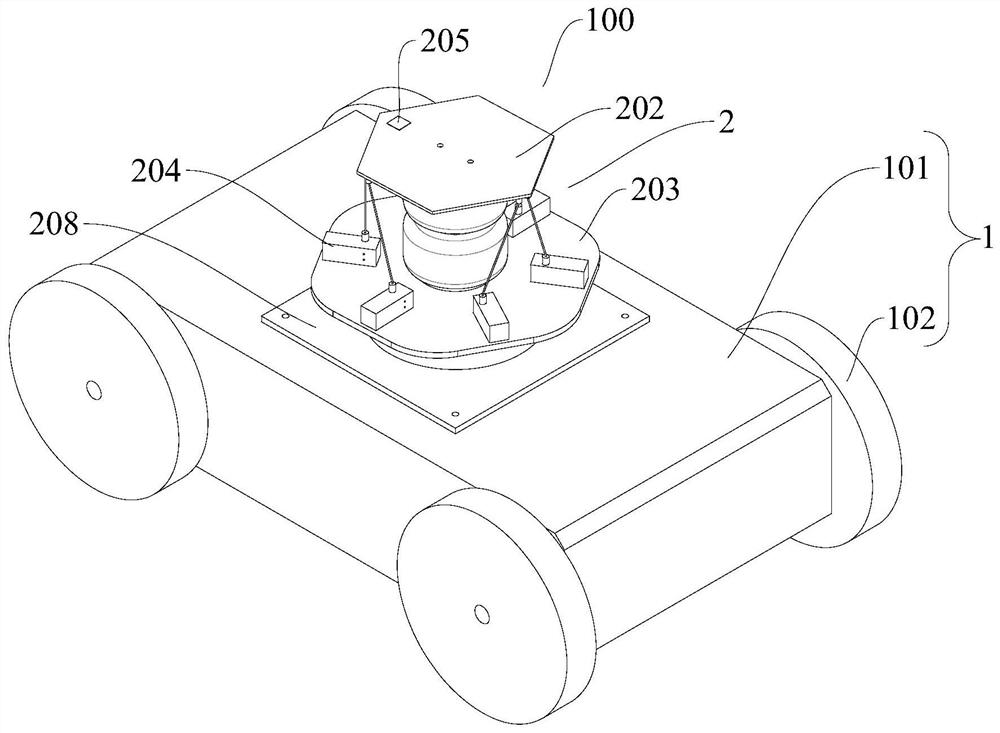
[0040] Such as Figure 1-Figure 5 As shown, the mobile robot multi-machine cooperative handling system according to the embodiment of the present invention includes a plurality of mobile robot assemblies 100, and the plurality of mobile robot assemblies 100 cooperate with each other.
[0041] The structures of the plurality of mobile robot assemblies 100 may all be the same, and the structure of at least one of the plurality of mobile robot assemblies 100 may be different from that of other mobile robot assemblies.
[0042] The number of mobile robot assemblies 100 is determined according to the shape and weight of the load, for example, for a load that is trian...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More