

Vehicle-mounted road surface detection robot
A robot and pavement technology, applied in instruments, measurement devices, radio wave measurement systems, etc., can solve the problems of ground penetrating radar module collision, better disassembly, complicated operation, inaccurate data collection, etc., to achieve good anti-collision performance, High practical value and promotion value, convenient connection effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
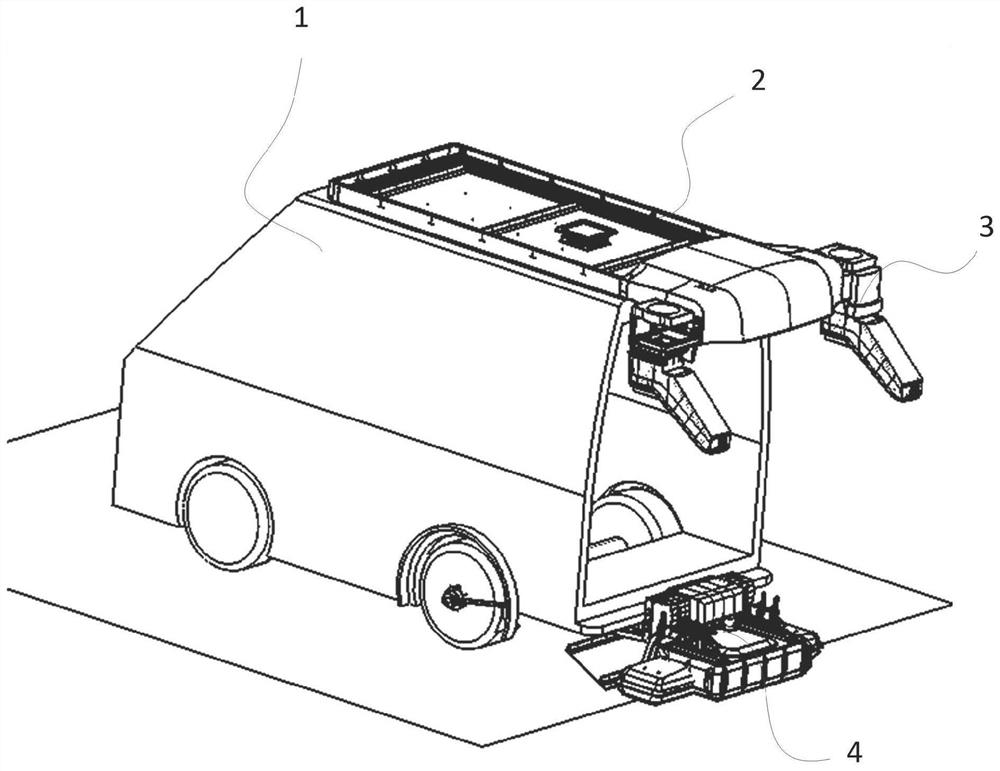
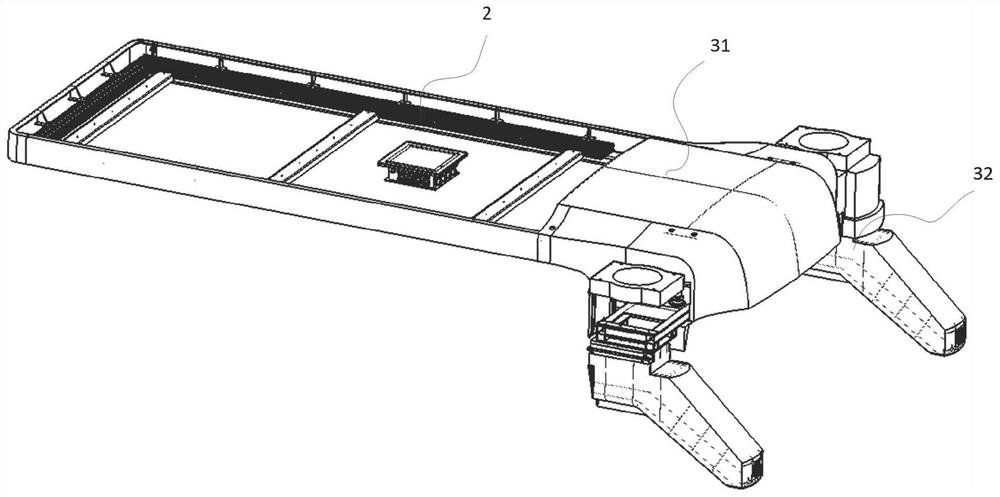
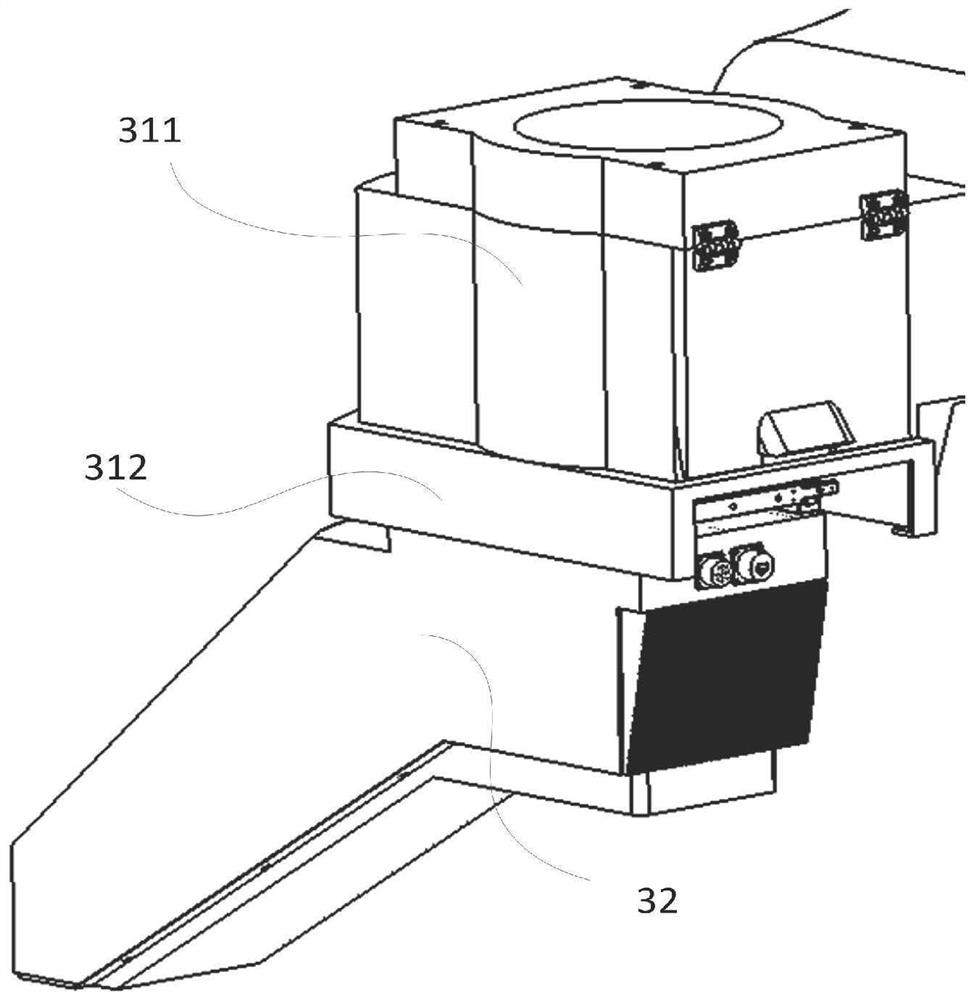
[0048] Such as Figure 1 to Figure 17 As shown, the present embodiment provides a vehicle-mounted road surface detection robot, which includes a detection car 1, a camera module 3 arranged on the top of the detection car 1 for taking images of the ground, arranged on the top of the detection car 1, and connected to the camera The roof frame 2 connected to the module 3, and the ground penetrating radar detection mechanism 4 towed on the detection trolley 1. First of all, it should be noted that the serial numbers such as "first" and "second" in this embodiment are only used to distinguish similar components, and should not be understood as specific limitations on the scope of protection. In addition, directional terms such as "bottom", "top", "surrounding edge", and "center" in this embodiment are described based on the drawings. Not only that, the body structure of the 3D camera in this embodiment belongs to the prior art, and its improvement points lie in the connection posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More