

Finger motor function rehabilitation robot
A rehabilitation robot and sports function technology, applied in sports accessories, passive exercise equipment, gymnastics equipment, etc., can solve the problems of lack of objective records of the rehabilitation process, unfavorable treatment plans, and high treatment costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The invention will be further described in detail below in conjunction with the accompanying drawings.
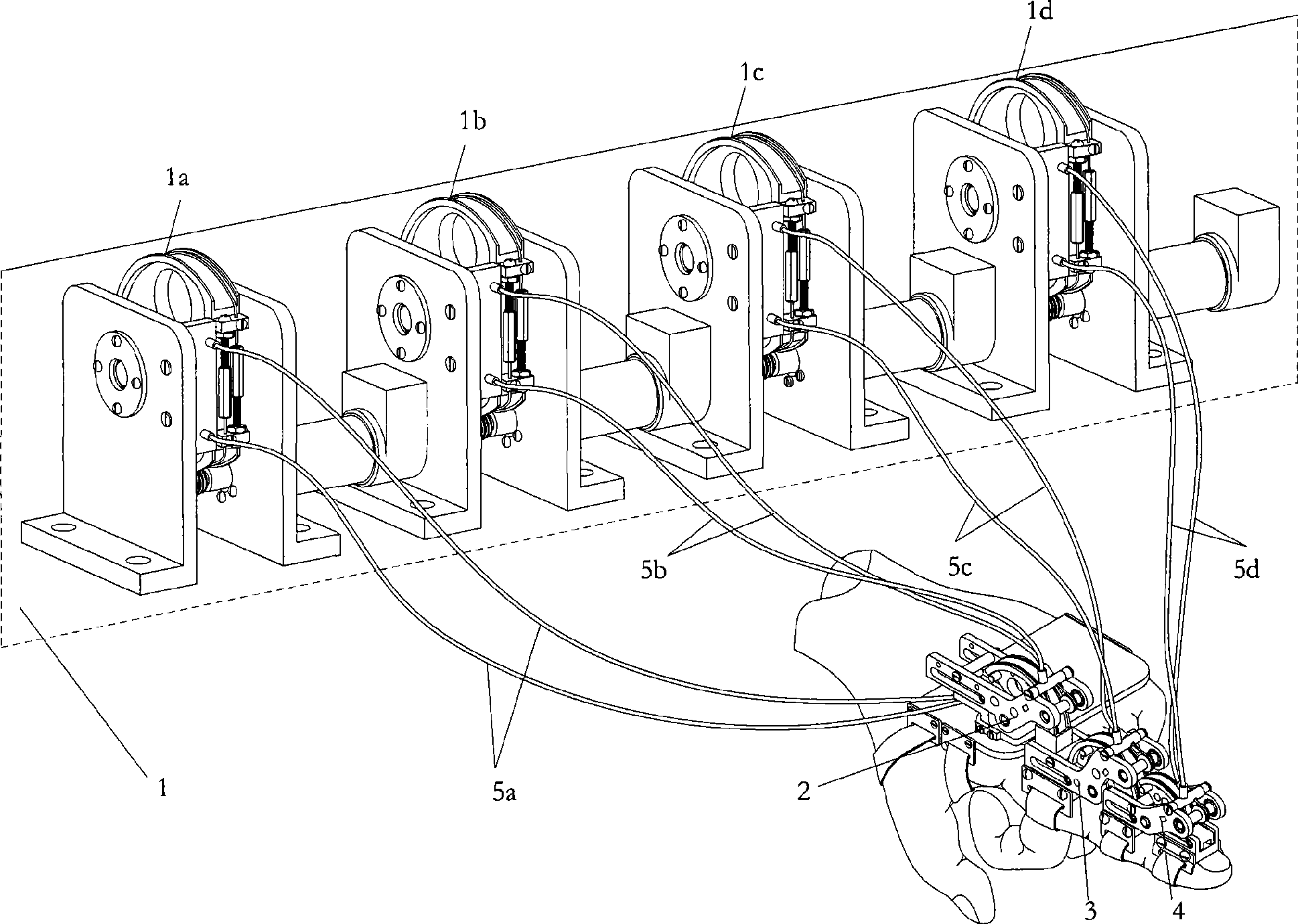
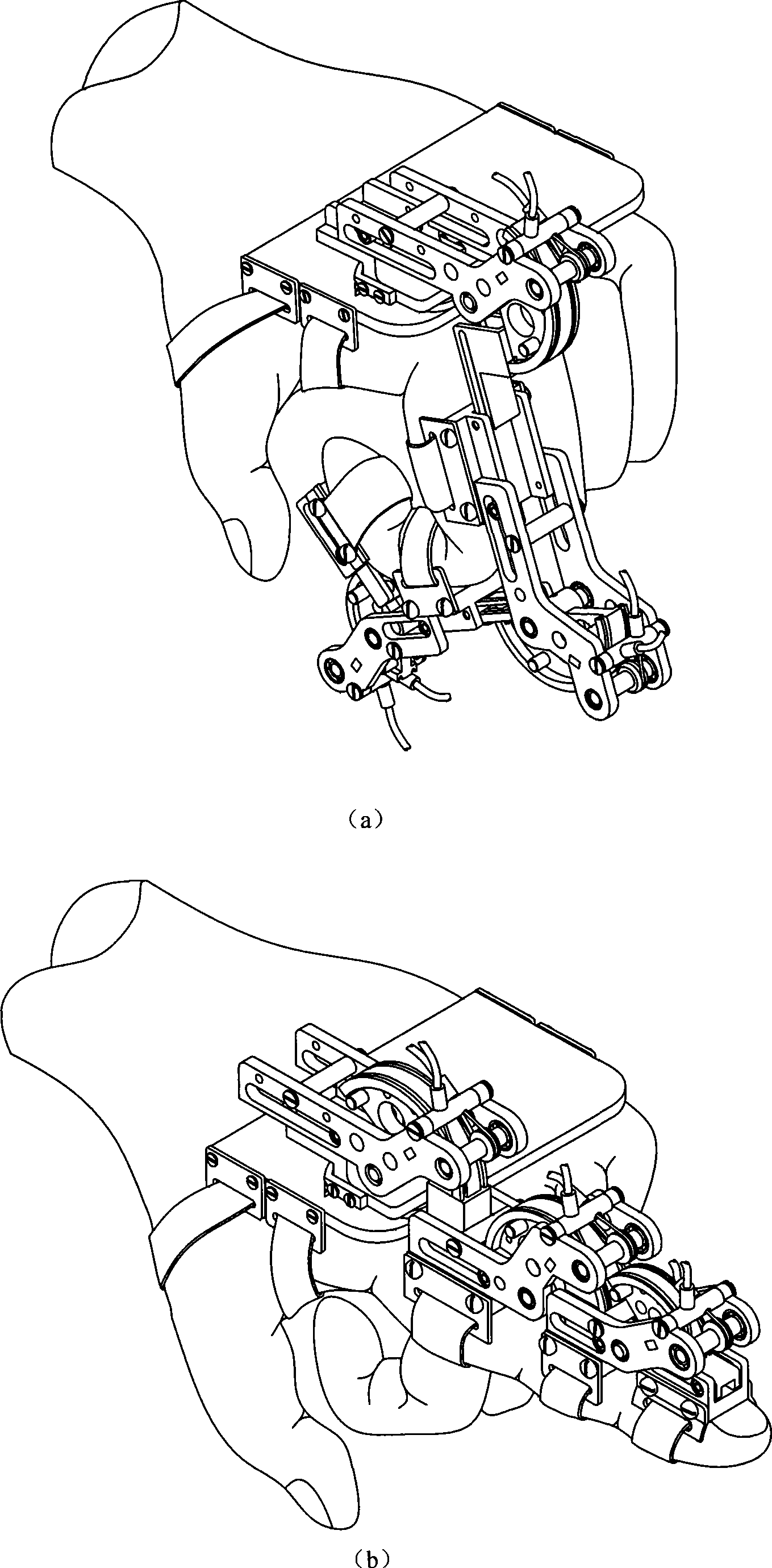
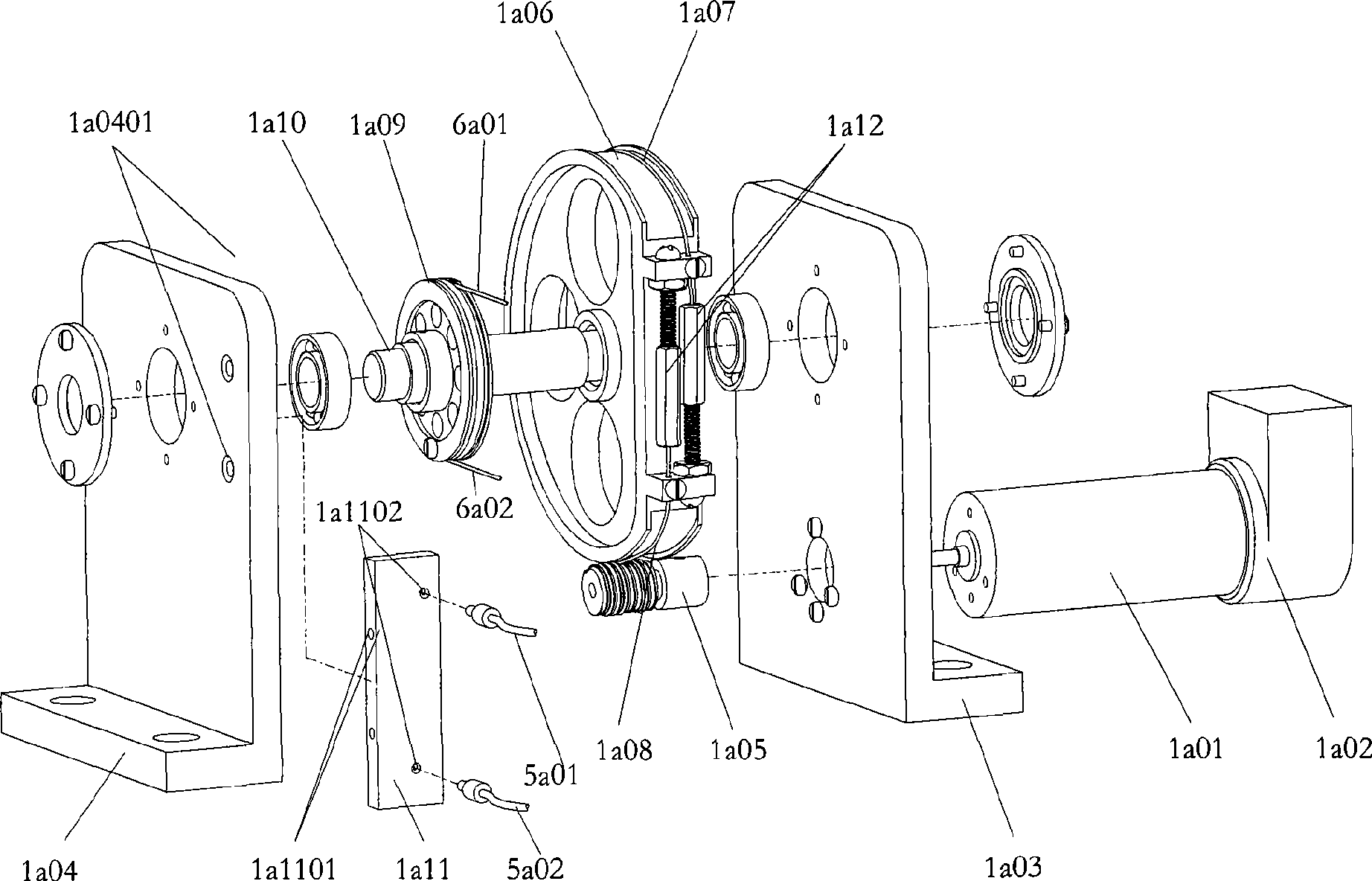
[0068] The present invention is a finger motor function rehabilitation robot, which can perform motor function rehabilitation training for other fingers except the thumb. figure 1 Shown is the system diagram of the entire rehabilitation robot, which can be divided into drive part 1 and execution part. The execution part can be divided into metacarpal joint module 2 (2 degrees of freedom), proximal joint module 3 (1 degree of freedom) and distal joint module 4 (1 degree of freedom) three parts; the driving part is divided into four identical driving modules 1a, 1b, 1c, 1d to realize the independent two-way driving of the three modules of the executive part with a total of four degrees of freedom and to realize the bending of fingers and straightening (eg figure 2 ), abduction and adduction movements. Since the whole system realizes long-distance and variable-distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More