

Exoskeleton type finger motion function rehabilitation robot
A rehabilitation robot and motion function technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as increasing cost, affecting system performance, limiting the range of motion of finger joints, etc., to achieve the effect of protection device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The invention will be further described in detail below in conjunction with the accompanying drawings.
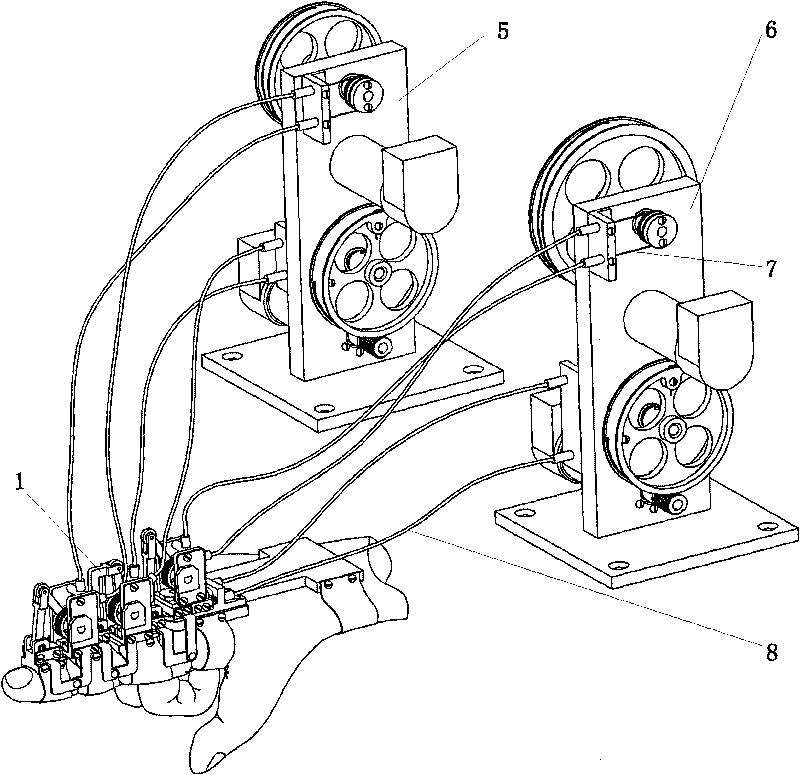
[0055] The present invention is an exoskeleton-type finger motor function rehabilitation robot. The embodiment of the invention is mainly aimed at the motor function rehabilitation training of the index finger, and its solution can also be applied to the rehabilitation training of the middle finger, ring finger and little finger. figure 1 Shown is the system diagram of the device, which can be divided into executive part 1, distal and proximal joint drive 5 and metacarpal joint drive 6. The distal and proximal joint drive 5 and the metacarpal joint drive 6 are independent of each other, and the individual two-way drive to the executive part 1 is realized through the steel wire rope 7 (8), so as to realize the rehabilitation action of bending and straightening, abduction and introversion of the patient's fingers. In order to prevent the wire rope 7 between the execut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More