

Service robot autonomous navigation method based on deformable topological map
A service robot and topological map technology, which is applied in the field of autonomous navigation of service robots based on deformable topological maps, can solve problems such as unobstructed information processing and incomplete maps, and achieve autonomous navigation, reduced labor intensity, and improved accuracy and efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
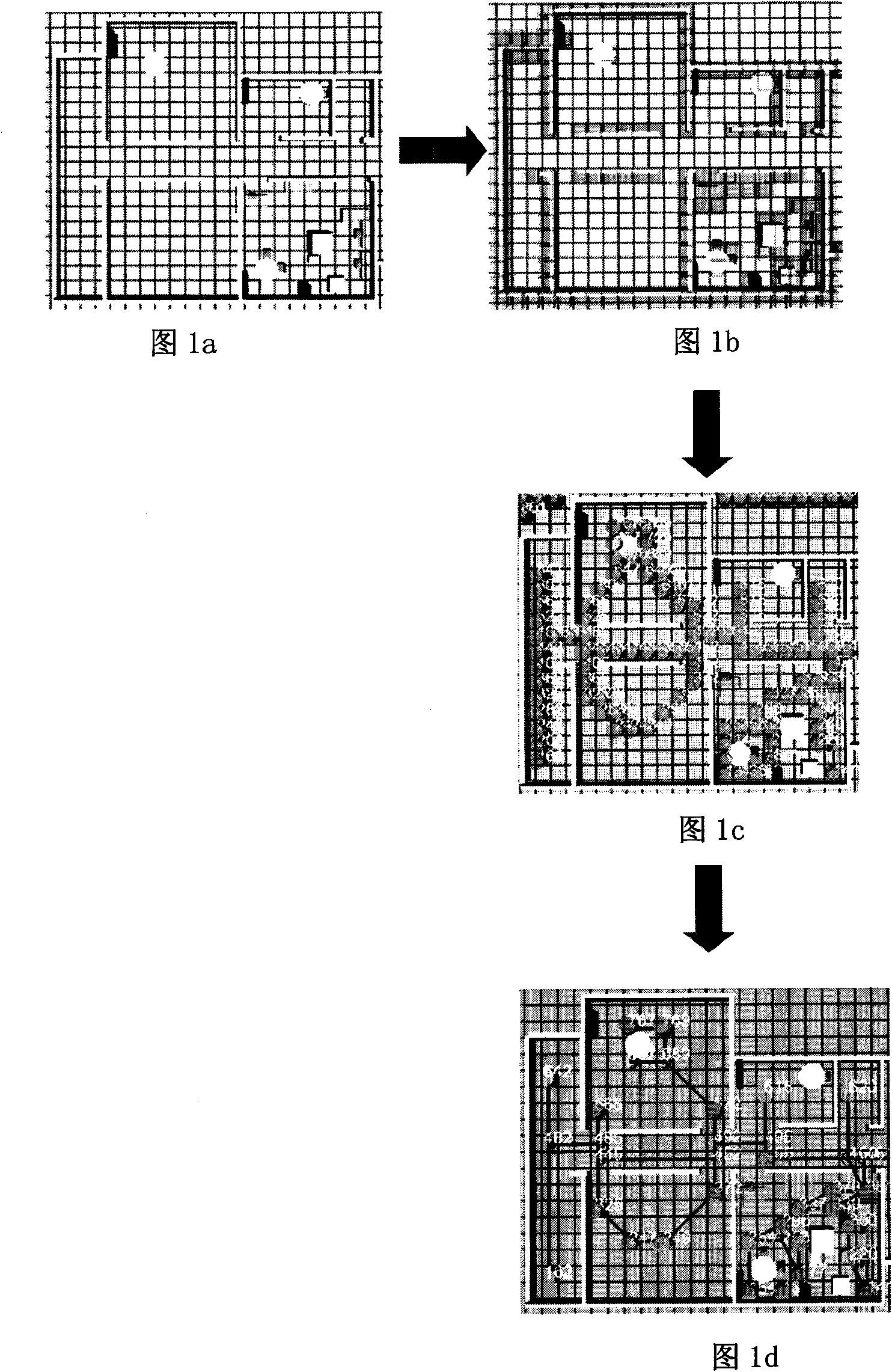
[0023] Such as figure 1 As shown, this embodiment includes the following steps: the first step, first connect the laser three-dimensional scanning sensor, the tilt sensor and six ultrasonic sensors to the service robot in parallel and respectively install the ultrasonic sensors around the service robot, and then set the laser three-dimensional The scanning sensor collects environmental data with a sampling period of 1 millisecond and performs analog-to-digital conversion to obtain the original three-dimensional environmental data; then set the tilt sensor to measure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More