

Method for initial alignment of inertial navigation system based on particle filtering
An inertial navigation system and initial alignment technology, which is applied in the field of inertial navigation and can solve the problems of high system dimension and unsuitable particle filtering.
Inactive Publication Date: 2010-08-25
NANJING UNIV OF AERONAUTICS & ASTRONAUTICS
View PDF3 Cites 14 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
The conventional initial alignment model uses the error equation of the inertial navigation system, the system dimension is high, and it is not suitable for the engineering application of particle filter
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
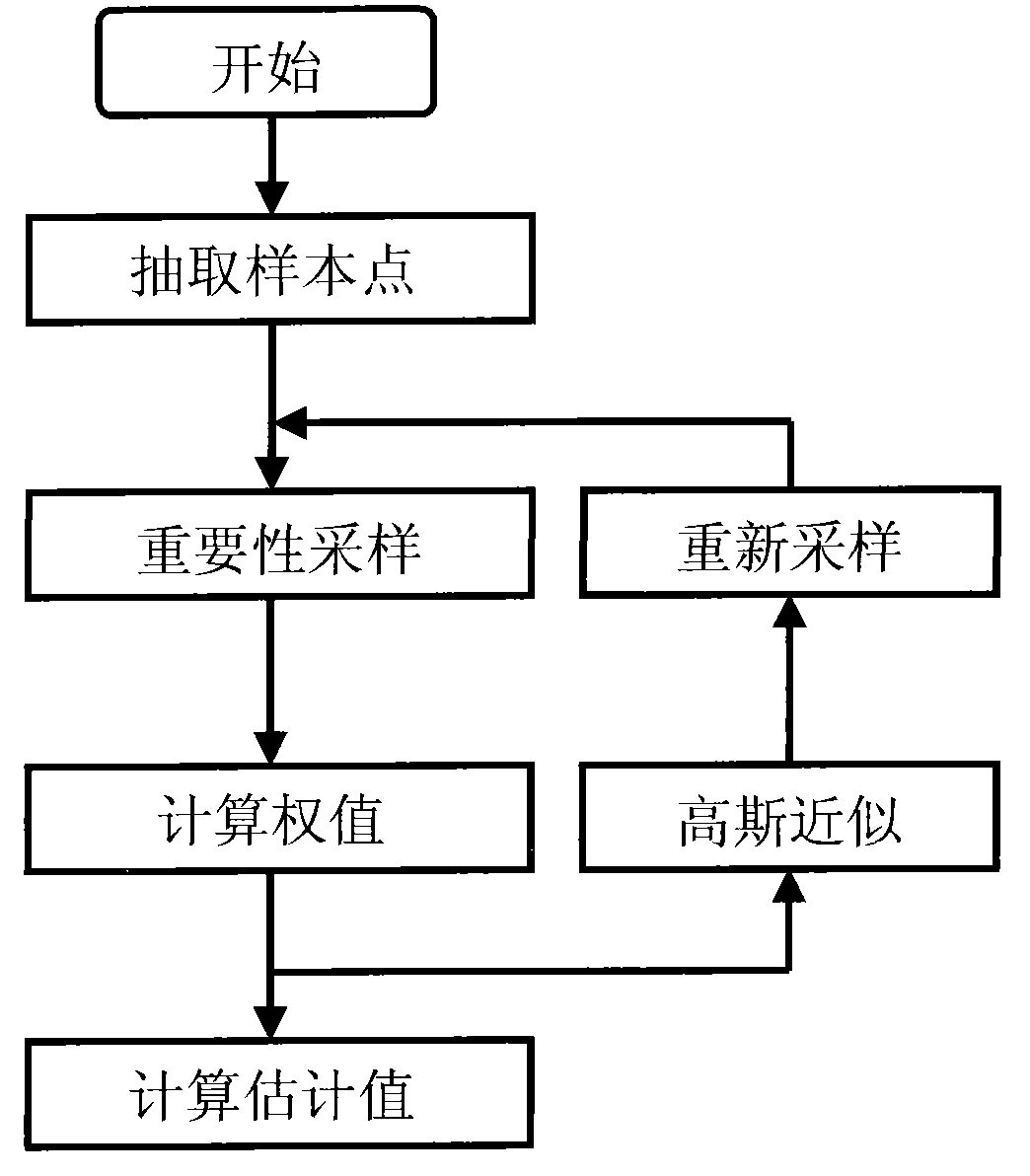
The invention discloses a method for initial alignment of an inertial navigation system based on particle filtering, which comprises the following steps: establishing a horizontal attitude angle calculation model based on two positions; establishing a course angle calculation model based on two positions; establishing a non-linear initial alignment model based on two positions; constructing a Gaussian particle filter for initial alignment; and collecting output information of an inertia device with a navigation computer and completing filtering for initial alignment. The invention adopts the two-position method to eliminate constant errors of the inertial device, thereby avoiding the state expansion for the errors of the inertial device and reducing the dimensions of the initial alignment model while ensuring the alignment precision. Since the dimensions of the non-linear initial alignment model based on two positions are only three-dimensional, the invention is suitable for engineering application of the particle filtering algorithm in initial alignment, satisfies the real-time requirements of particle filtering in initial alignment of the inertial navigation systems, and improves the accuracy and speed of initial alignment of the inertial navigation system.
Description
technical field The invention belongs to the technical field of inertial navigation, relates to an initial alignment method for an inertial navigation system, and is suitable for autonomous initial alignment of a static base before the inertial navigation system works. Background technique The purpose of the initial alignment of the inertial navigation system is to establish the attitude relationship of the carrier coordinate system of the inertial navigation system relative to a certain reference coordinate system before the inertial navigation system enters the navigation working state. The initial alignment error is one of the main error sources of the inertial navigation system, which directly affects the working accuracy of the inertial navigation system. At the same time, the initial alignment time is an important tactical index reflecting the rapid response capability of the weapon system. Higher alignment accuracy often requires longer alignment time, and solving the...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01C25/00G01C21/20G01C21/16
Inventor熊剑刘建业赖际舟周翟和曾庆化赵伟吕品郑智明万辉钟丽娜
OwnerNANJING UNIV OF AERONAUTICS & ASTRONAUTICS