

Bridge detection robot based on four-axle aircraft
A quadcopter and bridge inspection technology, which is applied in the direction of bridges, bridge parts, bridge construction, etc., can solve the problems of high maintenance and use costs, complicated use procedures, and expensive prices, and achieve low overall cost, compact structure, and simple operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be understood that the preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
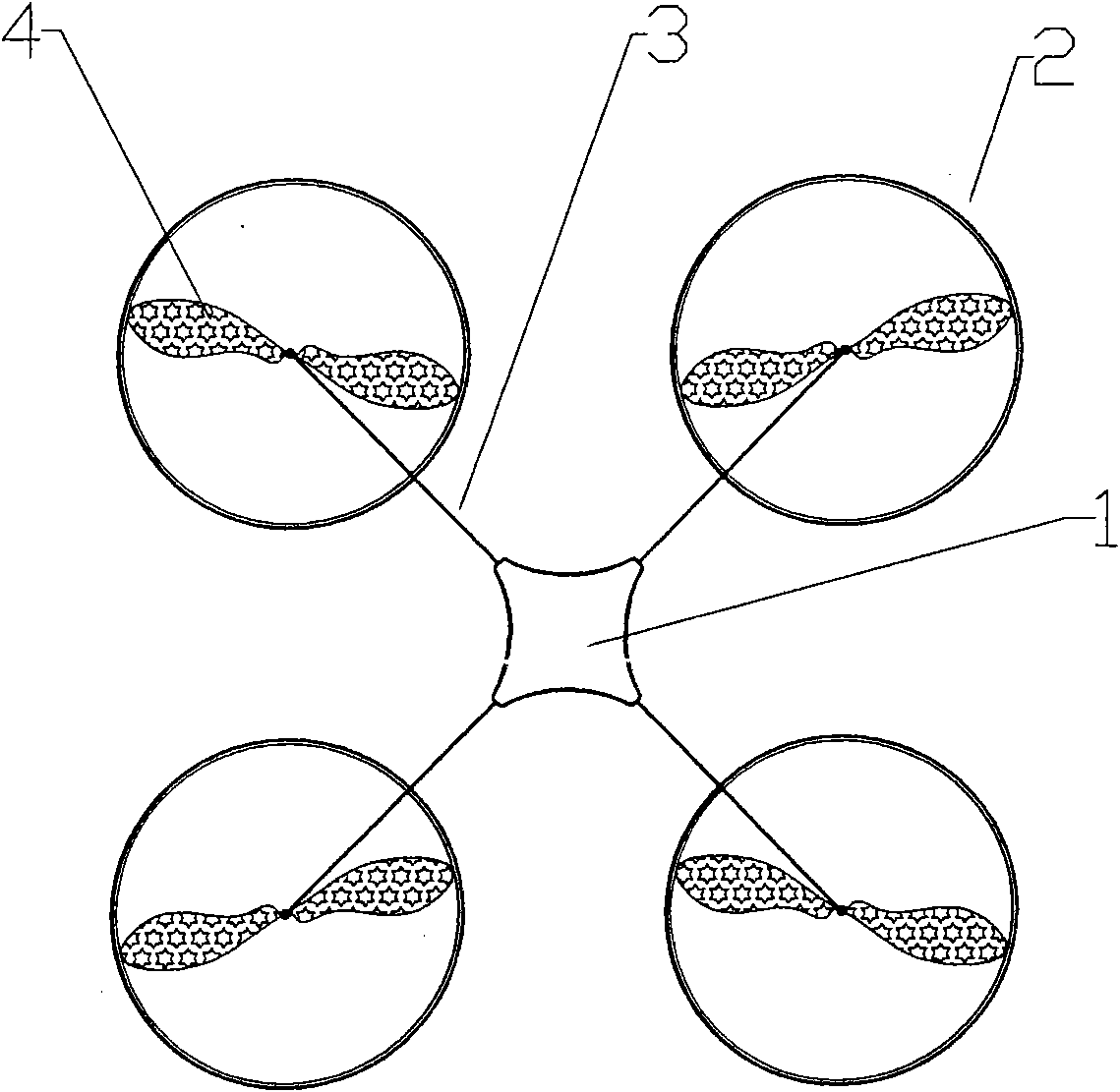
[0035] Such as figure 1 Shown, the bridge detection robot based on quadrocopter of the present invention comprises quadrocopter, and quadrocopter comprises main body 1, four groups of motor mounting covers 2, four groups of support arms 3 and multiple groups of geometrically identical and paired The geometric rotor 4 and the four sets of motor mounting covers 2 are respectively connected to the main body 1 through the support arms 3. The geometric rotors 4 are respectively arranged on the motor mounting covers 2. The quadcopter is in the shape of a "ten" as a whole. They are on the same plane and the angle between them is 90°.
[0036] In this embodiment, the main bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More