

Accessory position manipulating and automatic collision prevention monitoring method orientating to dual-arm engineering machinery
A technology of construction machinery and double arms, which is applied in the direction of manipulators, manufacturing tools, etc., to achieve the effect of improving operation efficiency, improving efficiency and ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings.
[0049] The control method and the self-collision avoidance method of the present invention are described for a construction machine with a classic double six-joint working arm.
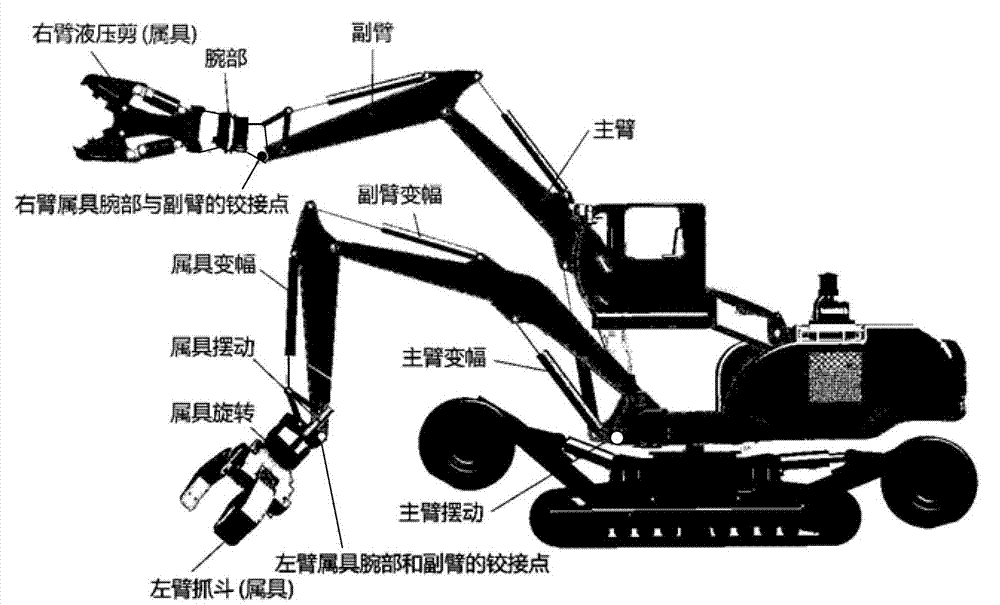
[0050] Such as figure 1 As shown, it is a 3D simulation model diagram of construction machinery with dual six-joint working arms. Among them, the single working arm is composed of main (articulated) arm, auxiliary (articulated) arm, attachment wrist and end attachment, including 6 joints in total, and the 6 joints from the front cab to the end attachment are as follows: main The left and right swing joints of the arm, the up and down luffing joints of the main arm, the up and down luffing joints of the auxiliary arm, the up and down luffing joints of the attachment, the left and right swinging joints of the attachment, and the rotation joints of the attachment respectively realize the left an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More