

Industrial table type mechanical arm
A robotic arm and industrial technology, applied in the field of industrial desktop robotic arms, can solve problems such as high component dependence, troublesome processing, and affecting work quality and efficiency, and achieve strong program control, easy manufacturing and installation, and flexible working conditions Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Below by embodiment and in conjunction with accompanying drawing, the present invention will be further described:
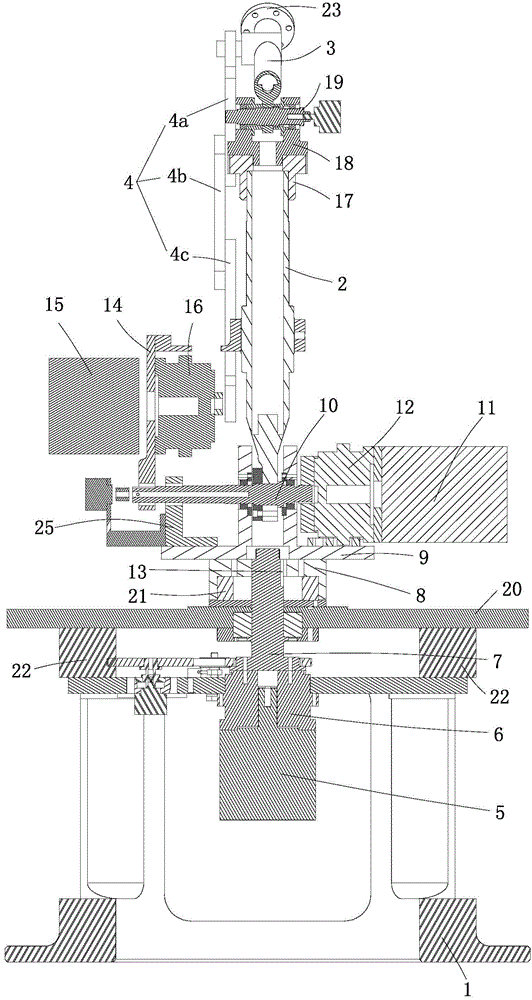
[0017] Such as figure 1 As shown, an industrial desktop mechanical arm consists of a base frame 1, a large arm 2, a small arm 3, a connecting rod 4, a first drive motor 5, a first reducer 6, a main transmission connection plate 7, and a large arm turntable 8 , boom base bracket 9, boom shaft 10, second drive motor 11, second reducer 12, spline 13, motor mounting plate 14, third drive motor 15, third reducer 16, boom flange Disk 17, forearm bracket 18, forearm shaft 19, work surface 20, plane bearing 21, table support block 22, mechanical claw motor installation flange 23, reducer installation connection plate 24, second drive motor support angle frame 25 and so on.
[0018] There is a cavity inside the base frame 1 , and a first driving motor 5 is vertically arranged in the cavity of the base frame 1 . After the first drive motor 5 is decelerated by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More