

Scale-controllable type snakelike robot
A snake-shaped robot, a controllable technology, applied in the field of bionic robots, can solve the problems of complex structure, inability to achieve straight back on the original path, and unsatisfactory use effect, and achieve the effect of enhancing applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
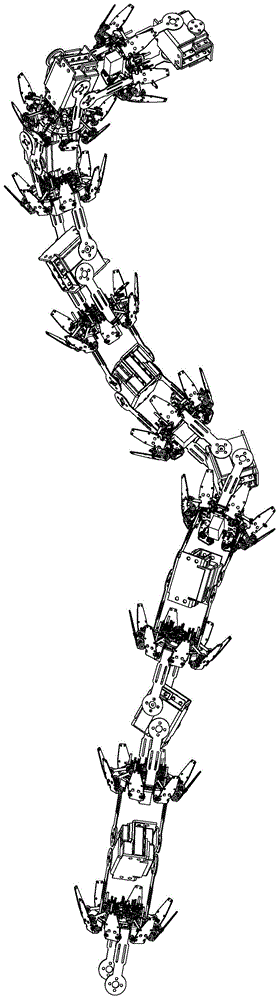
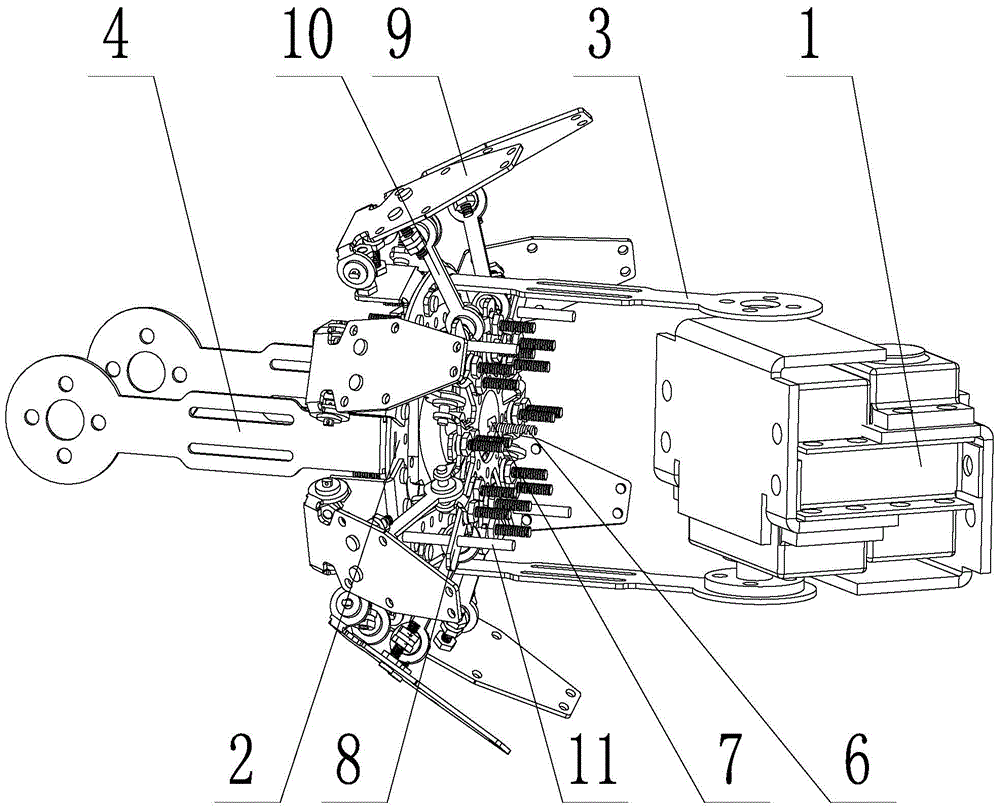
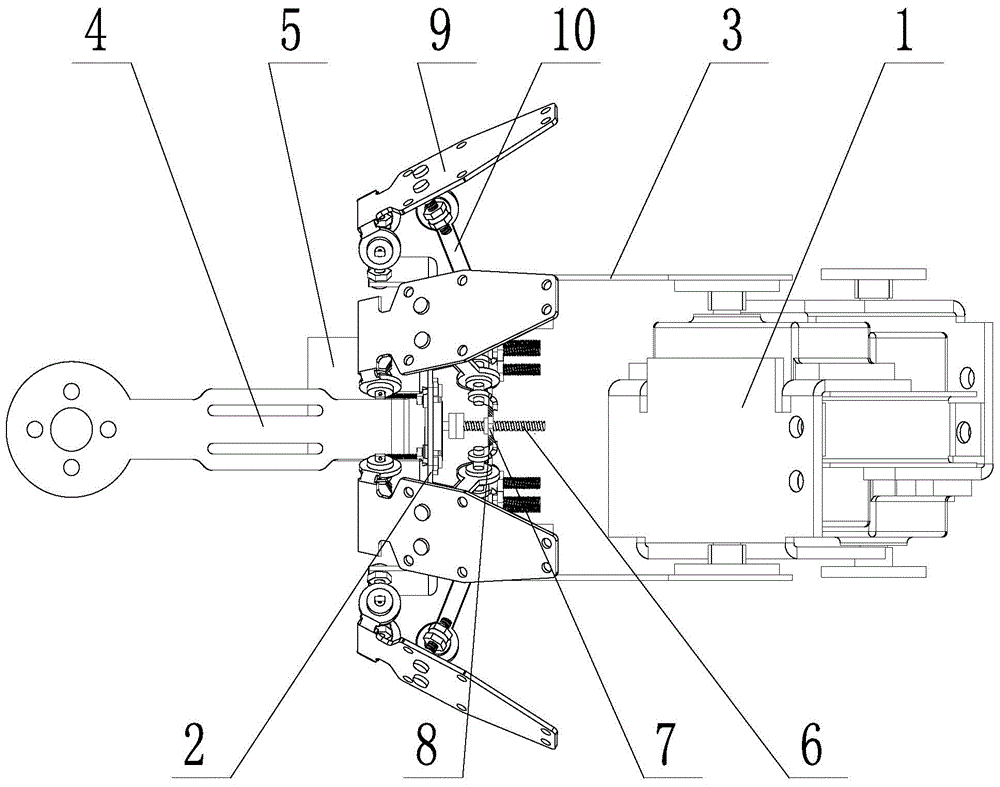
[0021] Such as figure 1 , 2 , Shown in 3, 4, a kind of scale controllable snake-shaped robot, comprises several unit modules, and is combined by the end-to-end connection of several unit modules;
[0022] The unit module includes a dual-motor driven steering gear 1, a module skeleton 2 and a scale mechanism. The dual-motor driven steering gear 1 includes two identical motors, and the motor shafts of the two motors are arranged in parallel;
[0023] The module skeleton 2 is disc-shaped, and two first steering gear connecting arms 3 are fixedly installed on one side of the module skeleton 2, and the two first steering gear connecting arms 3 are arranged symmetrically with respect to the center of the module skeleton 2. 2 Two second steering gear connecting arms 4 are fixedly installed on the other side, and the two second steering gea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More