

Rigid-flexible coupled trunk-shaped continuous robot
A rigid-flexible coupling and robot technology, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools, can solve problems such as inflexible movement, complex robot control technology, and complex processing and assembly, and achieve the effect of reducing motion inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
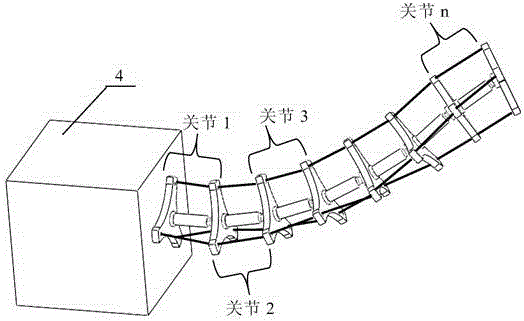
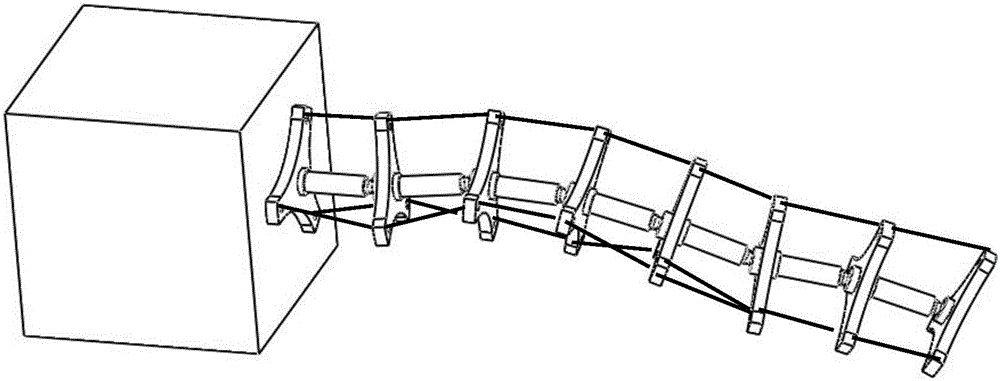
[0016] Such as Figure 1-3 As shown, a rigid-flexible coupling elephant trunk type continuous robot provided by the present invention includes a control box 4, one group (n) of joints with identical structures are installed on one side of the control box, and each joint is connected end to end in series to form a A rigid-flexible coupled trunk-type continuous robot.
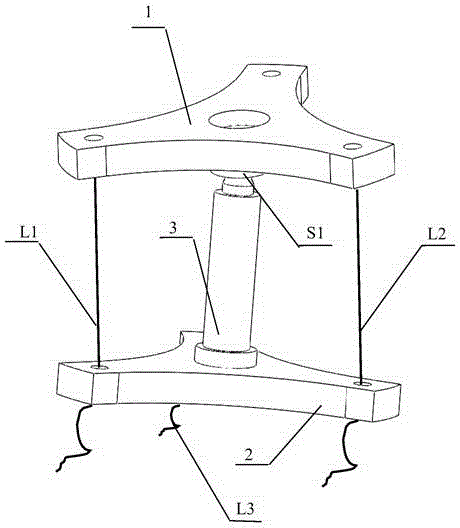
[0017] Such as figure 2 As shown, each of the joints is composed of a moving platform 1, a fixed platform 2, a support rod 3 connecting the above two platforms, and three driving cables (L1, L2, L3). Wherein: one end of the support rod 3 is vertically fixedly connected to the fixed platform, and the other end is connected to the moving platform 1 through a ball pair (S1);
[0018] One end of the three driving ropes is respectively fixedly connected to the three endpoints of the moving platform, and the other end passes through the three endpoints of the fixed platform and is connected to the sheave in the cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More