

Obstacle detection method for snow removal robot
A technology of obstacle detection and robotics, which is applied in the field of obstacle detection of snow removal robots, can solve problems such as thick road accumulation, low degree of automation, and inconvenient municipal traffic, and achieve high detection accuracy, good adaptability, and avoid errors. The effect of the alarm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0021] The obstacle detection method of the snow-plowing robot in this embodiment includes the following steps:
[0022] 1) Set the left, middle and right ultrasonic sensors on the snow-sweeping robot, and detect the distance information between the snow-sweeping robot and obstacles through the ultrasonic sensors;
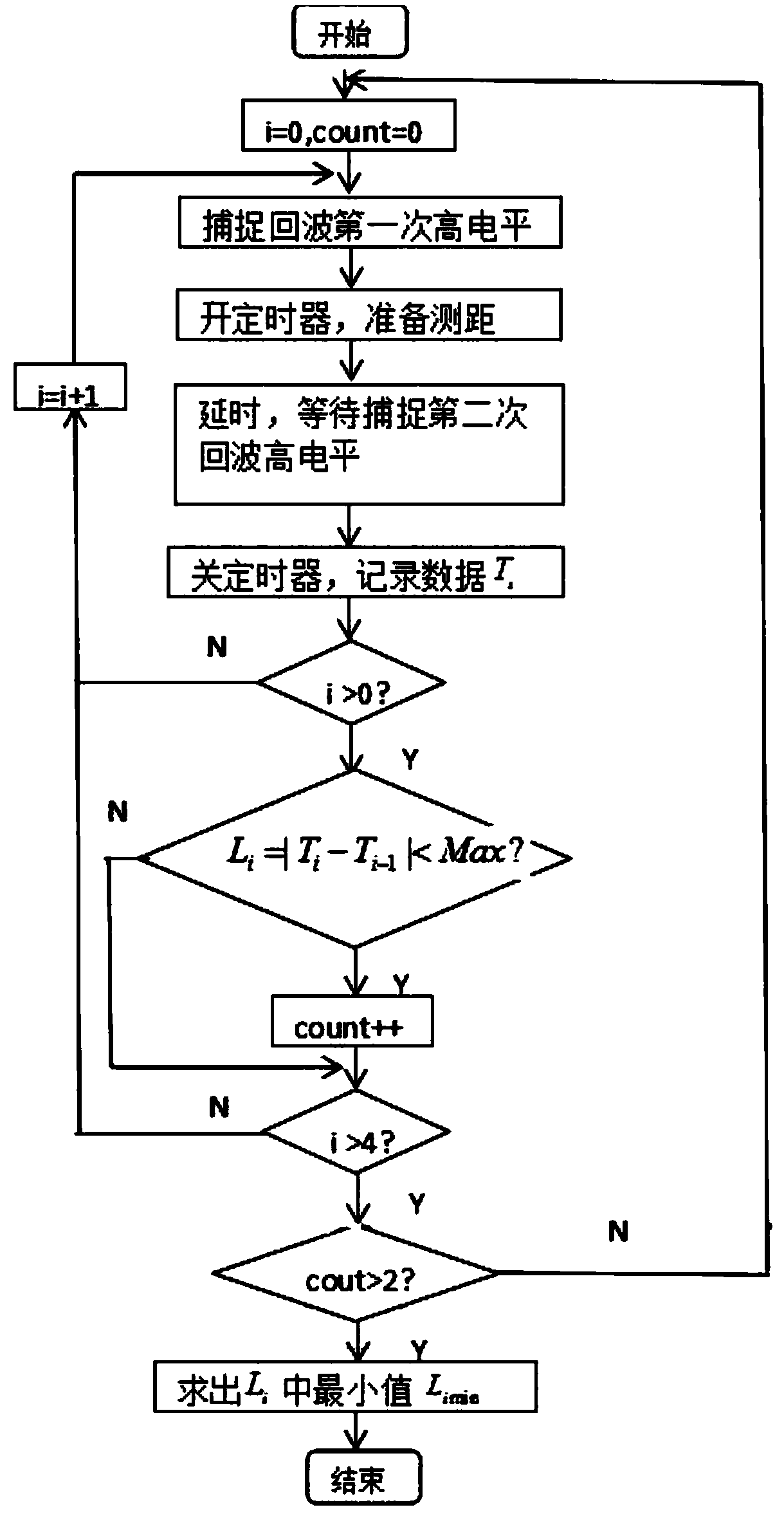
[0023] 2) Process the detection signal
[0024] a. Processing of the aftershock interference signal of the ultrasonic sensor probe:
[0025] The vibration of the probe of the ultrasonic sensor will last for a period of time after sending the driving pulse, and the vibration of the probe is mechanical vibration, which cannot be eliminated; the high-frequency pulse signal generated by the vibration will be mistaken for the echo signal by the receiving port of the ultrasonic sensor to generate distance measurement, so To filter out the afters...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More