

Gait-based wearable flexible knee joint robot exoskeleton facility
A technology of knee joints and exoskeletons, applied in the direction of devices that help people walk, sensors, passive exercise equipment, etc., can solve problems such as users' psychological disapproval, and achieve the effects of increasing the sense of identity, overcoming large quality, and overcoming large volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
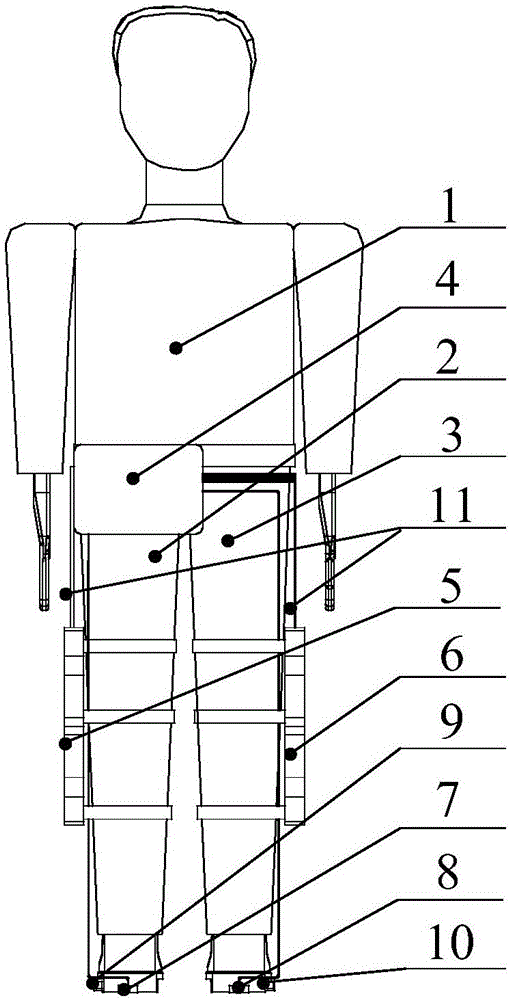
[0042] like Figure 1-3 As shown, a gait-based wearable flexible knee robot exoskeleton equipment is mainly composed of a power and control system 4, a left leg knee airbag actuator assembly 5, a right leg knee airbag actuator assembly 6, and a left foot pressure Switch assembly 7, right foot pressure switch assembly 8, left foot miniature attitude sensor 9, right foot miniature attitude sensor 10 and air pipe assembly 11 etc. are formed.
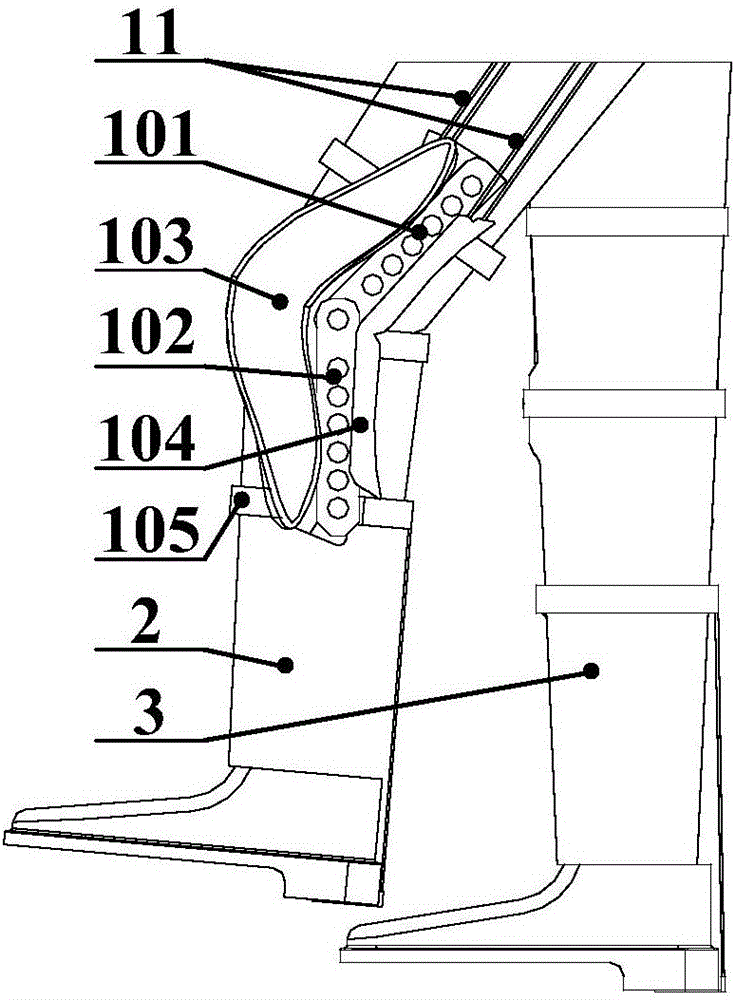
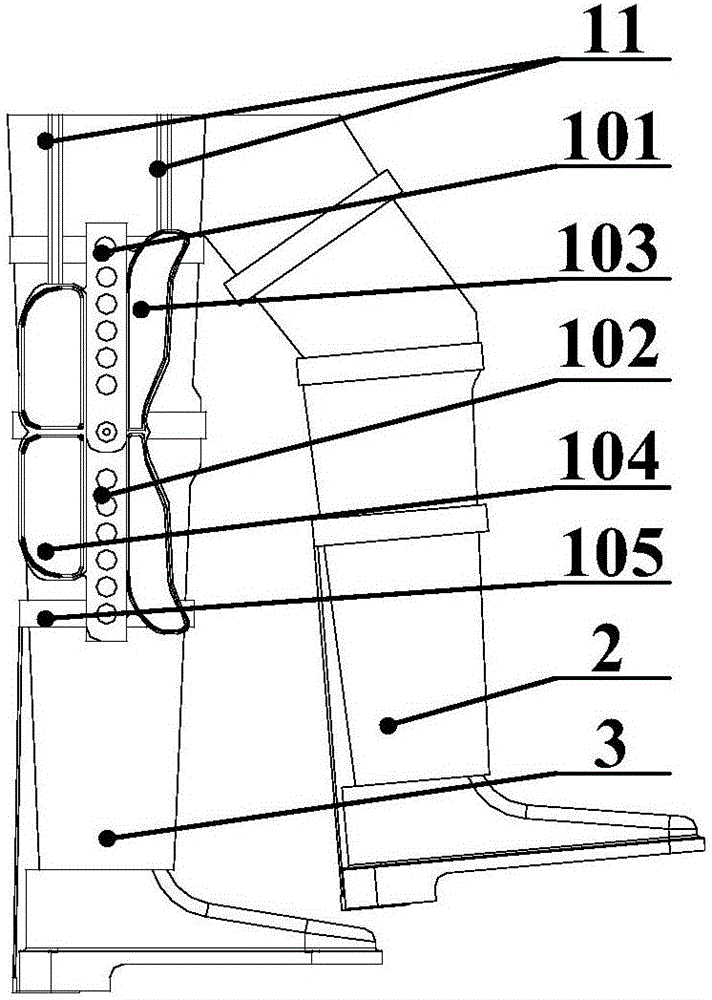
[0043] like figure 2 and 3 As shown, the left knee airbag actuator assembly 5 and the right knee airbag actuator assembly 6 are mainly composed of a thigh fixing plate 101, a calf fixing plate 102, an outer airbag 103, an inner airbag 104, and a flexible fixing belt 105. The thigh fixing plate 101 and the calf fixing plate 102 are made of h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More