Flight control method and device of unmanned aerial vehicle
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of flight control and drones, which is applied in the field of drones to achieve the effect of improving safety
Inactive Publication Date: 2017-05-17
EWATT TECH CO LTD
View PDF5 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0006] The embodiment of the present invention provides a flight control method for unmanned aerial vehicles, which solves the problem that the unmanned aerial vehicle has no mechanism to adjust when executing instructions on the heavy-duty unmanned aerial vehicle in the prior art, causing the unmanned aerial vehicle to buffer and shut down. The performed operations will no longer be applicable, resulting in risks such as collision between the UAV and obstacles, and has the technical effect of effectively controlling the flight and shutdown of the UAV and improving the safety of the UAV and the operator.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0029] The first aspect of the embodiment of the present application provides a UAV flight control method, please refer to the figure
[0030] 1, figure 1 It is a flowchart of a UAV flight control method in an embodiment of the invention. The method includes:
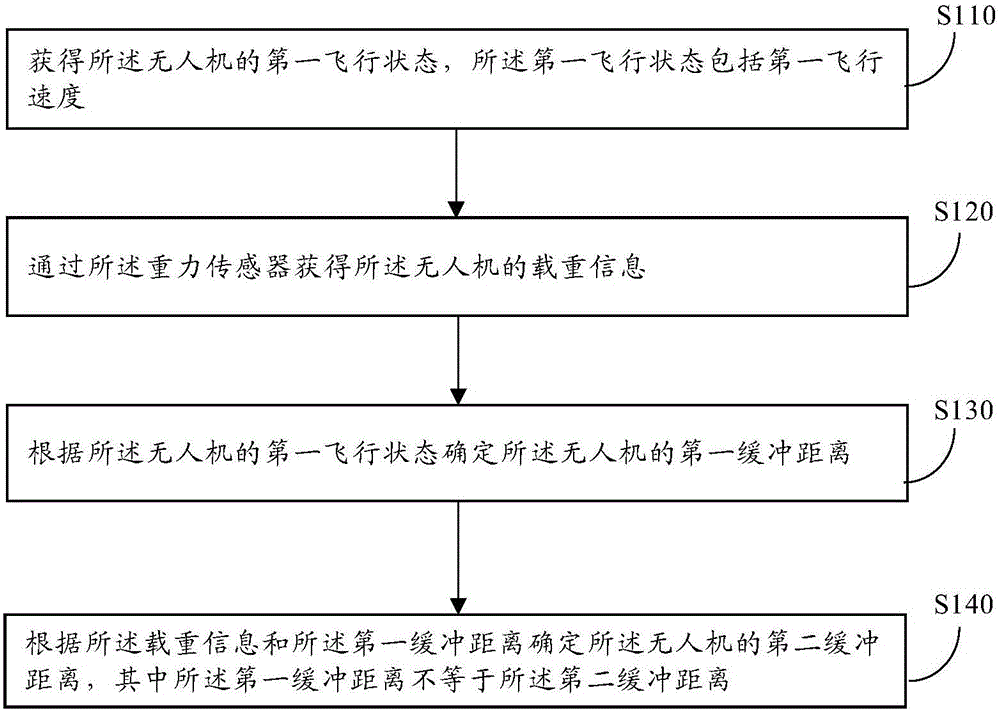
[0031] Step 110: Obtain a first flight state of the drone, where the first flight state includes a first flight speed.
[0032] Specifically, when the UAV is in a flying state, the flight speed of the UAV during normal flight is obtained. The flight state may be the flight state in the case of performing a variety of different tasks, for example: map surveying, forest survey, emergency rescue, logistics express, high-altitude photography and other situations. Generally speaking, the first flight state of the UAV may include a variety of state information, such as flight speed, such as flight altitude, such as the operating conditions of various devices in flight, and the like. In the embodiment of the present applic...
specific Embodiment approach 1
[0043] When the first flight direction is vertical ascent, it is determined that the absolute value of the third correction index is a first correction minimum value.
[0044] Specifically, when the unmanned aerial vehicle is flying vertically upward under the load state, an obstacle is found above the unmanned aerial vehicle. At this time, the unmanned aerial vehicle needs to execute a shutdown command to avoid collision with the obstacle. To stop the unmanned aerial vehicle from rising, those skilled in the art should know that since the unmanned aerial vehicle is in an overweight state at this time, if it is stopped, the force required is less than that required in a weightless state, so the The absolute value of the third correction index is the minimum value of the first correction.
specific Embodiment approach 2
[0046] When the first flight direction is vertical descent, it is determined that the absolute value of the third correction index is a first correction maximum value.
[0047] Specifically, when the UAV is flying vertically under the load state, an obstacle is found under the UAV, and the UAV needs to execute a stop command at this time to avoid collision with the obstacle. To stop the unmanned aerial vehicle from descending, those skilled in the art should know that since the unmanned aerial vehicle is in a weightless state at this time, if it is stopped, the required force will be greater than that required in an overweight state. The absolute value of the third correction index is the first correction maximum value.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
Theinvention provides a flight control method and device of an unmanned aerial vehicle, and relates to the field of electronic technologies. The flight control method comprises the steps of obtaining a first flight state of the unmanned aerial vehicle, wherein the first flight state includes a first velocity; obtaining loading information about the unmanned aerial vehicle; determining a first buffer distance of the unmanned aerial vehicle according to the first flight state of the unmanned aerial vehicle; determining a second buffer distance of the unmanned aerial vehicle according to the loading information and the first buffer distance. The problem in the prior art is solved that when the loading unmanned aerial vehicle executes instructions and as the unmanned aerial vehicle has no mechanism to adjust the instructions, operation performed is no longer applicable in the buffer downtime, and thus such a risk as collision between the unmanned aerial vehicle and obstacles happens. The flight control method and device have the advantages of effectively controlling the unmanned aerial vehicle flight and downtime, and improving the safety of the loading unmanned aerial vehicle and operators.
Description
technical field [0001] The invention relates to the technical field of unmanned aerial vehicles, in particular to a flight control method and device for an unmanned aerial vehicle. Background technique [0002] At present, drones are widely used in map surveying, forest surveying, emergency rescue, logistics express, high-altitude photography and other fields. [0003] With the development of drone technology, in order to ensure the safety of drones or operators in the prior art, a security mechanism for drones is set to ensure the safety of drones or operators. For example, when the drone encounters an obstacle during flight, the drone is operated so that it does not collide with the obstacle. [0004] But, the inventor finds that there are following deficiencies in the prior art in daily work: [0005] When the UAV is loaded, it will have an impact on the flight state of the UAV, and the execution instructions of the UAV are set for the no-load state. There is no mechan...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.




 Login to View More
Login to View More  Login to View More
Login to View More