Flight control method and flight control apparatus for unmanned aerial vehicle
A flight control and UAV technology, applied in the aviation field, can solve problems such as the collision danger of UAVs, and achieve the effect of avoiding UAV collisions, effectively detecting obstacles, and keeping the same flight direction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0033] When the UAV is in the vertical flight mode, if the flight attitude changes, the sensing direction of the distance sensor will also change with the flight attitude, which will easily lead to unsafe flight. For example, when the UAV adopts the flight action of oblique flight, since the distance sensor will also tilt the sensing direction with the oblique flight of the UAV, the above-mentioned oblique flight action of the distance sensor makes the vertical direction measured by the distance sensor Errors occur in the distance of obstacles, which reduces flight safety.
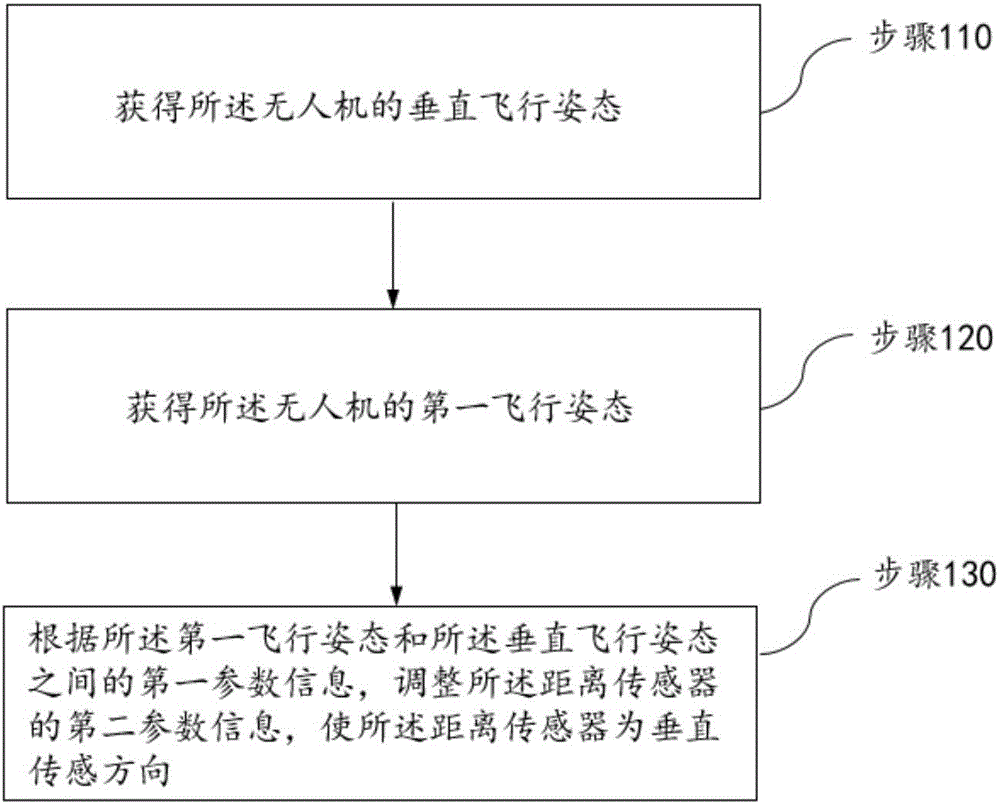
[0034] Such as figure 1 As shown, this embodiment provides a flow chart of a UAV flight control method, wherein the UAV includes a distance sensor, and the method includes:
[0035] Step 110: Obtain the vertical flight attitude of the drone;
[0036]Specifically, the vertical flight attitude of the UAV is the flight attitude in which the fuselage of the UAV is perpendicular to the flight direction. Gene...
Embodiment 2
[0079] Such as image 3 As shown, the embodiment of the present application also provides a UAV flight control device, the UAV includes a distance sensor, wherein the device includes:
[0080] A first obtaining unit 11, the first obtaining unit 11 is used to obtain the vertical flight attitude of the drone;
[0081] A second obtaining unit 12, the second obtaining unit 12 is used to obtain the first flight attitude of the drone;
[0082] A first adjustment unit 13, the first adjustment unit 13 is configured to adjust the second parameter information of the distance sensor according to the first parameter information between the first flight attitude and the vertical flight attitude, so that the The distance sensor is a vertical sensing direction.
[0083] Further, the device also includes:
[0084] a third obtaining unit, the third obtaining unit is used to obtain the first flight direction of the UAV;
[0085] A first determining unit, the first determining unit is config...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More