

A kind of unmanned aerial vehicle flight control method and device
A technology for flight control and unmanned aerial vehicles, which is applied in the directions of safety devices, control/regulation systems, non-electric variable control, etc. to achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
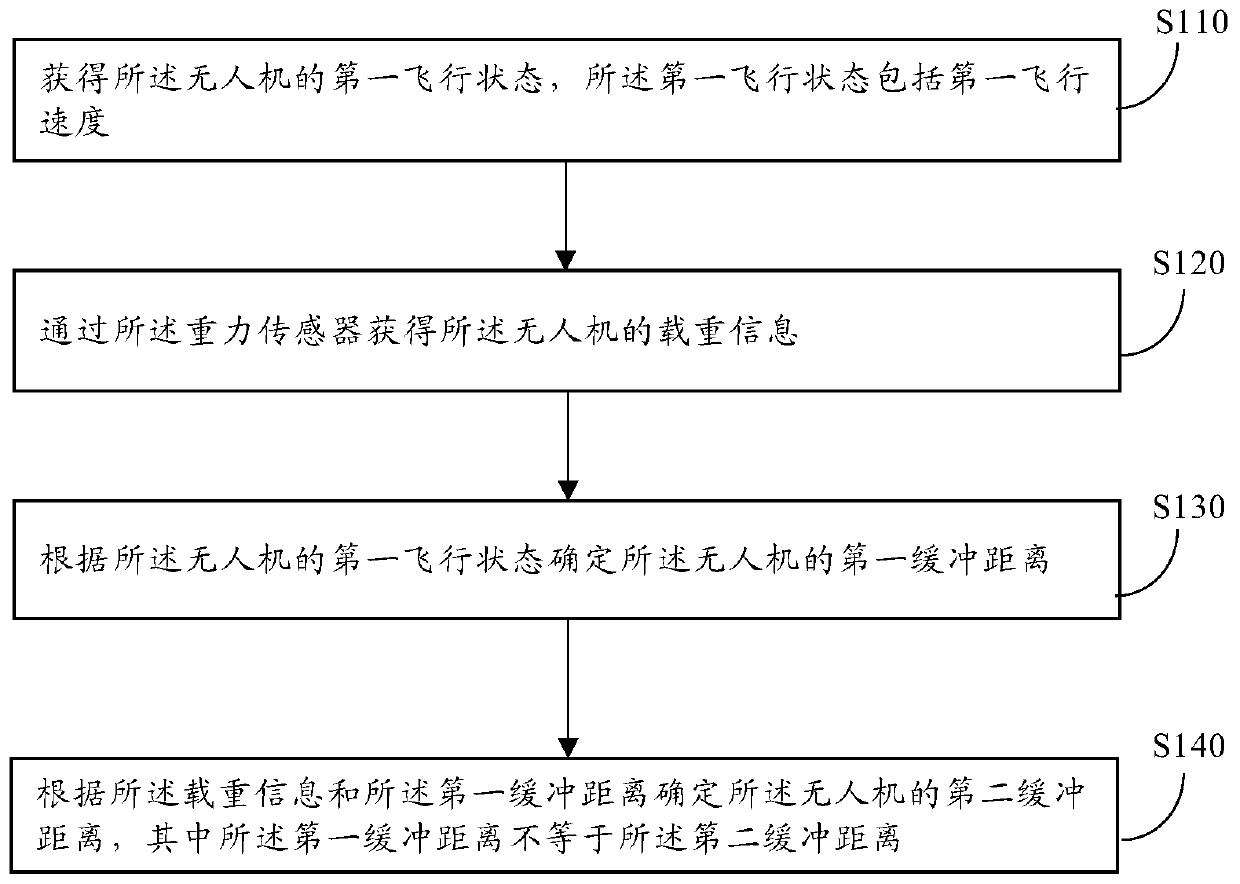
[0029] The first aspect of the embodiment of the present application provides a UAV flight control method, please refer to the figure
[0030] 1, figure 1 It is a flowchart of a UAV flight control method in an embodiment of the invention. The method includes:
[0031] Step 110: Obtain a first flight state of the drone, where the first flight state includes a first flight speed.
[0032] Specifically, when the UAV is in a flying state, the flight speed of the UAV during normal flight is obtained. The flight state may be the flight state in the case of performing a variety of different tasks, for example: map surveying, forest survey, emergency rescue, logistics express, high-altitude photography and other situations. Generally speaking, the first flight state of the UAV may include a variety of state information, such as flight speed, such as flight altitude, such as the operating conditions of various devices in flight, and the like. In the embodiment of the present applic...
specific Embodiment approach 1
[0043] When the first flight direction is vertical ascent, it is determined that the absolute value of the third correction index is a first correction minimum value.
[0044] Specifically, when the unmanned aerial vehicle is flying vertically upward under the load state, an obstacle is found above the unmanned aerial vehicle. At this time, the unmanned aerial vehicle needs to execute a shutdown command to avoid collision with the obstacle. To stop the unmanned aerial vehicle from rising, those skilled in the art should know that since the unmanned aerial vehicle is in an overweight state at this time, if it is stopped, the force required is less than that required in a weightless state, so the The absolute value of the third correction index is the minimum value of the first correction.
specific Embodiment approach 2
[0046] When the first flight direction is vertical descent, it is determined that the absolute value of the third correction index is a first correction maximum value.
[0047] Specifically, when the UAV is flying vertically under the load state, an obstacle is found under the UAV, and the UAV needs to execute a stop command at this time to avoid collision with the obstacle. To stop the unmanned aerial vehicle from descending, those skilled in the art should know that since the unmanned aerial vehicle is in a weightless state at this time, if it is stopped, the required force will be greater than that required in an overweight state. The absolute value of the third correction index is the first correction maximum value.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More