

Automatic charging control method of robot
A control method and automatic charging technology, which is applied in the direction of instruments, current collectors, electric vehicles, etc., can solve the problems of inability to complete autonomous charging and reduce the scope of autonomous activities of robots, so as to increase the scope of autonomous activities and prevent errors. The effect of simplifying the design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
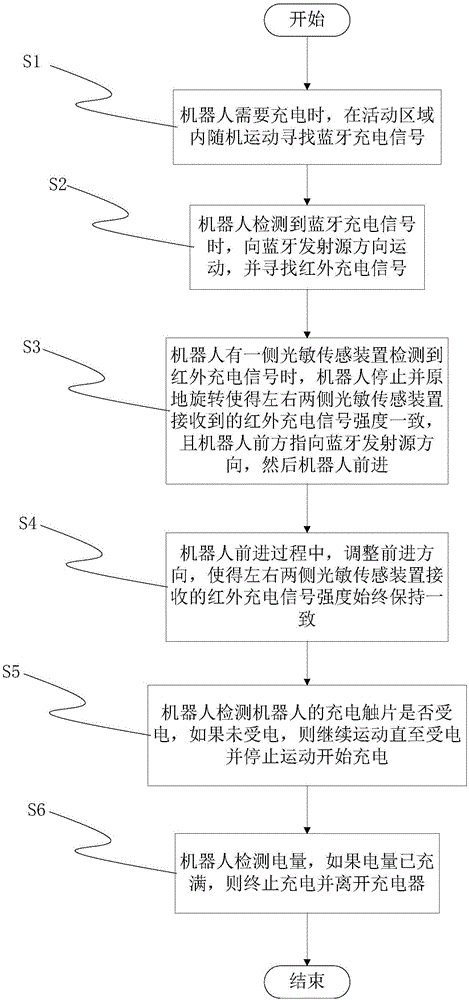
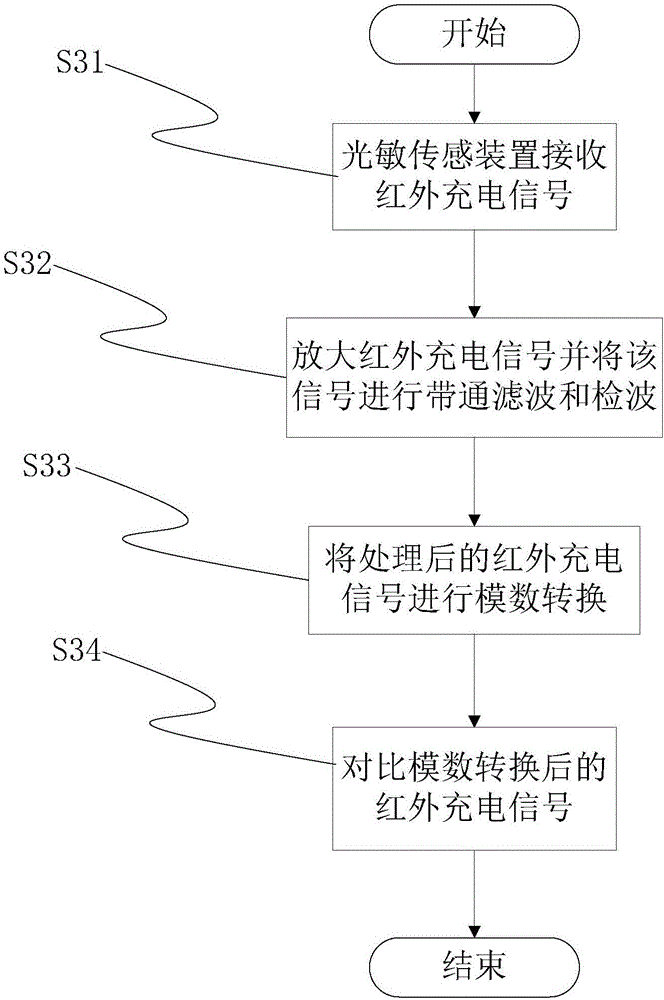
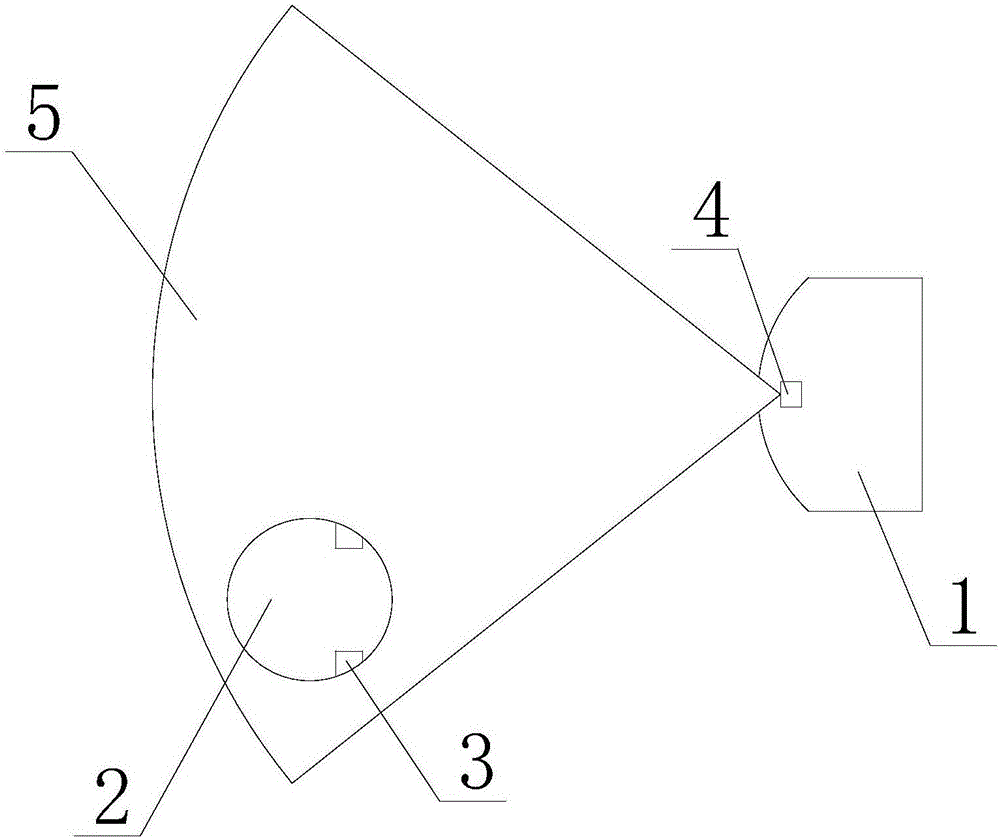
[0035] Such as figure 1 with image 3 As shown, a robot automatic charging control method of the present invention is characterized in that the robot 2 includes a Bluetooth directional receiver, a charging contact piece, and photosensitive sensing devices 3 arranged on the left and right sides; A light source 4 and a bluetooth beacon; the infrared charging signal emitted by the infrared light source 4 to the charger 1 is distributed in a fan-shaped area centered on the infrared light source 4; the bluetooth beacon emits a bluetooth charging signal; the bluetooth directional receiver Receive bluetooth charging signal; Described a kind of robot automatic charging control method comprises the following steps: when robot 2 needs to charge, search bluetooth charging signal in the random motion in activity area; When robot 2 detects bluetooth charging signal, moves towards bluetooth transmitting source , and look for the infrared charging signal; when the photosensitive sensor devi...
Embodiment 2
[0038] On the basis of Embodiment 1, this embodiment further includes the following steps: the robot 2 detects the power, and if the power is fully charged, it stops charging and leaves the charger 1 .
[0039] When this embodiment is implemented, when the robot 2 detects that the battery is fully charged, it does not need to communicate with the charger 1 , and only needs to terminate the charging and leave the charger 1 to complete the charging.
Embodiment 3
[0041] In this embodiment, on the basis of Embodiment 1, the robot 2 sets a timer, and the timer sets the timing time as 30s; when the robot 2 moves to the Bluetooth signal source, if the robot 2 cannot detect the Bluetooth charging signal, the timer starts, and the robot 2. Rotate in place to detect the Bluetooth charging signal. When the timer reaches the set time and the robot cannot detect the Bluetooth charging signal, it will perform random motion again to find the Bluetooth charging signal.
[0042] When this embodiment is implemented, when the robot 2 detects the Bluetooth charging signal and moves towards the Bluetooth signal source, an obstacle appears between the Bluetooth signal source and the robot 2, the Bluetooth charging signal is blocked, and the robot 2 cannot detect the Bluetooth charging signal, then The timer starts, and the robot 2 rotates on the spot to detect the Bluetooth charging signal. When the timer reaches 30s, the robot 2 cannot detect the Bluetoo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More