

Wearable upper limb exoskeleton power-assisting device
A power-assisted device and exoskeleton technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high cost, low practical value, and complex structure, and achieve the effects of improving efficiency, high practical value, and increasing starting traction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in further detail below in conjunction with the embodiments given in the accompanying drawings.
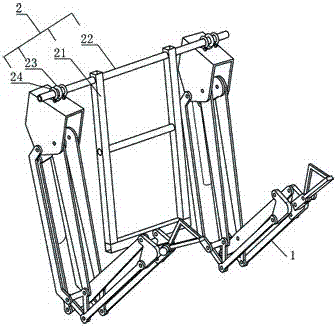
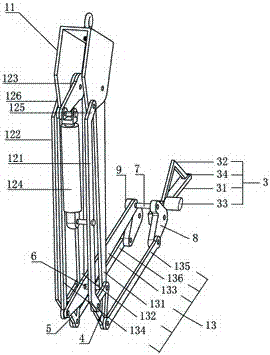
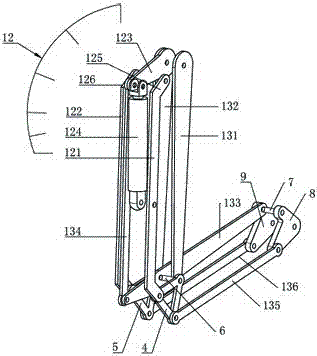
[0018] refer to Figure 1-5 As shown, a wearable upper extremity exoskeleton booster device in this embodiment includes a mechanical arm device 1, a support device 2 and a grasping device 3. One end of the mechanical arm device 1 is connected to the support device 2, and the other end is connected to the grasping device 3 connected, the mechanical arm device 1 includes a base 11, a power assembly 12 and an arm assembly 13, the power assembly 12 includes a first transmission member 121, a second transmission member 122, a driven member 123 and a cylinder 124, the first transmission member 121 and the The front ends of the second transmission member 122 are respectively hinged on the base 11, the tail end of the first transmission member 121 is hinged on a corner of the first triangular plate 4, and the tail end of the second transmissi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More