

Handheld minimally-invasive surgical instrument with self-locking function
A minimally invasive surgery, hand-held technology, used in surgery, medical science and other directions, can solve the problems of low flexibility, lack of self-locking, inconvenient operation, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
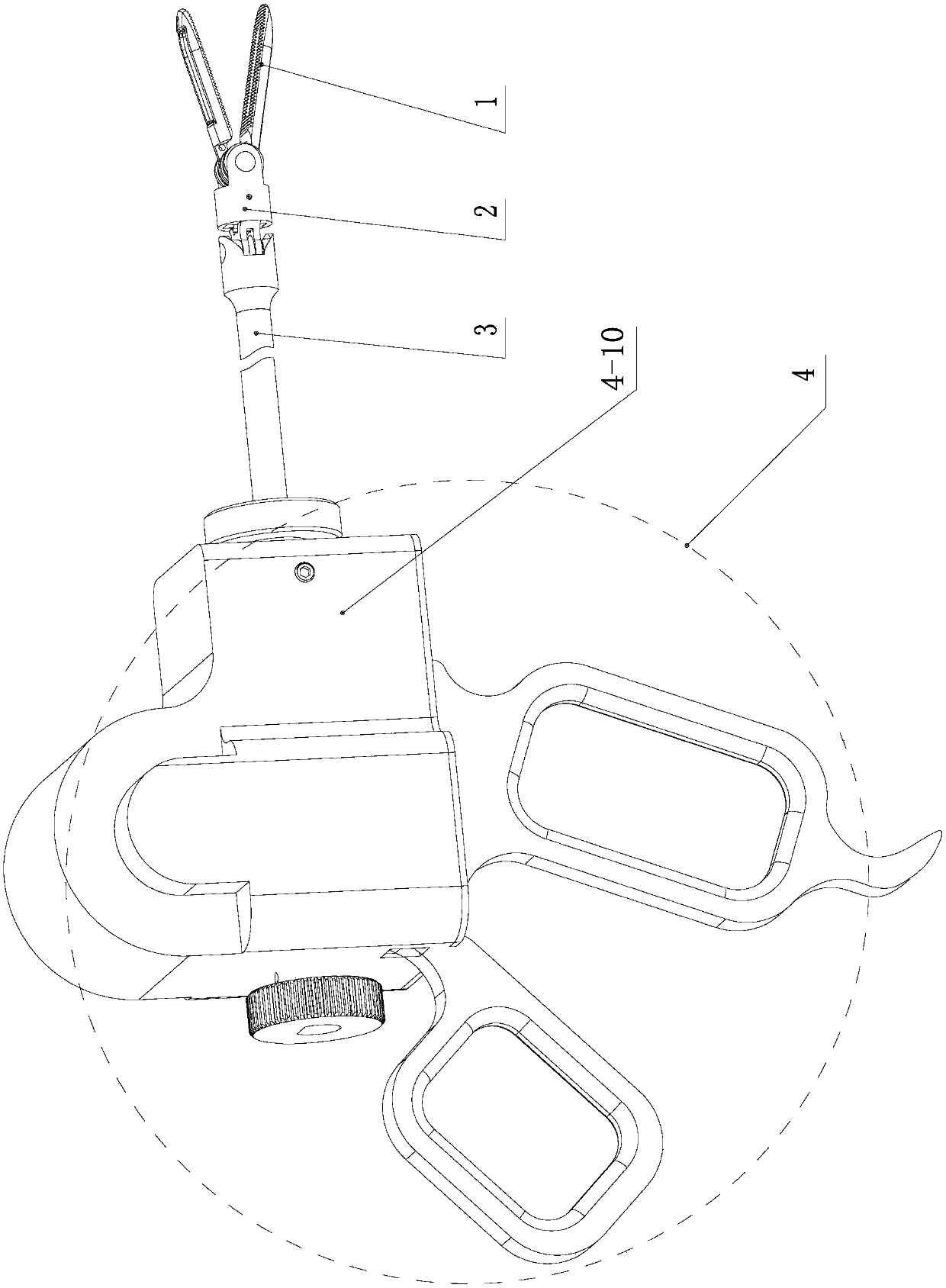
[0039] see Figure 1-Figure 12 Explain that a self-locking hand-held minimally invasive surgical instrument includes an end effector 1, an end wrist joint 2, an end effector operating device 3 and a handle operating device 4;
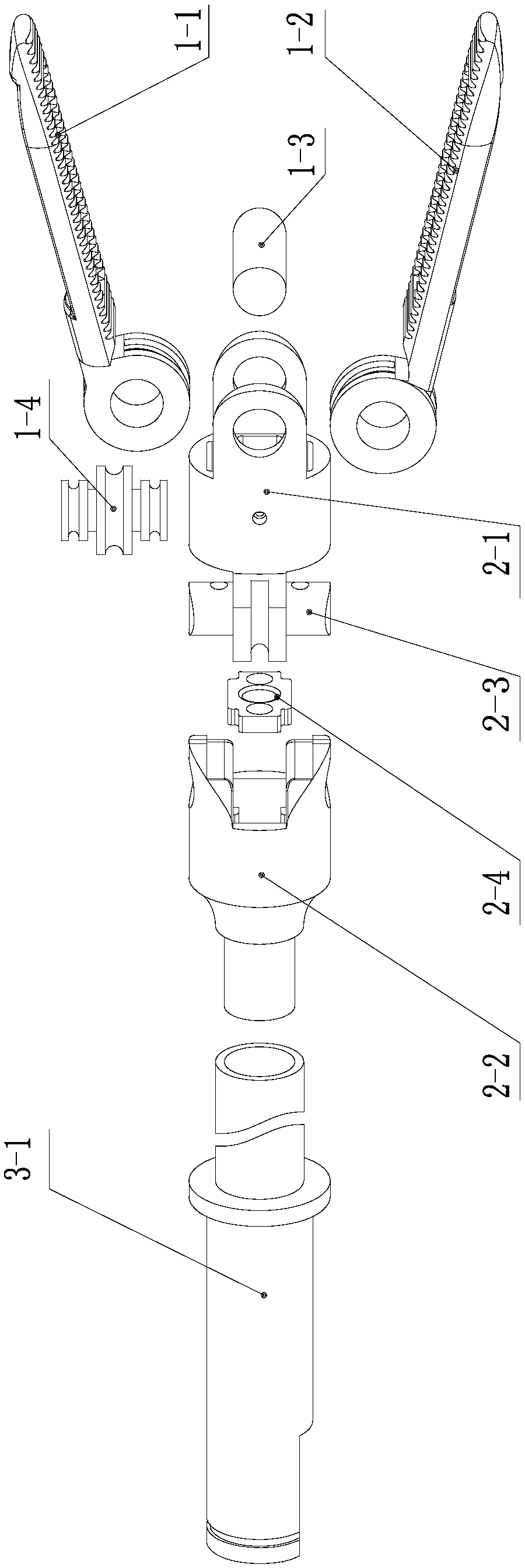
[0040]The terminal wrist joint 2 includes a wrist rotation joint 2-1, a wrist connector 2-2, a joint rotation shaft 2-3 and a rope guide block 2-4; the wrist rotation joint 2-1 passes through the joint rotation shaft 2 -3 is rotationally connected with the wrist connector 2-2, and the rope guide block 2-4 is connected with the wrist connector 2-2;
[0041] The end effector 1 includes two terminal fingers 1-1, an opening and closing rotation shaft 1-3 and a rope guide wheel 1-4; the opening and closing rotation shaft 1-3 is installed on the wrist rotation joint 2-1, two The terminal finger 1-1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More